

大家好![]()
我是这里的新人,目前正在尝试为UR5e建模一个简单的工具更换器。
到目前为止,我的两个工具都能工作,但工具2的TCP(工具中心点)位置不对。当我将其改为夹取一个方块时,突然无法切换回工具1了。
非常感谢任何帮助!
测试模拟.vcmx(303.0 KB)
大家好![]()
我是这里的新人,目前正在尝试为UR5e建模一个简单的工具更换器。
到目前为止,我的两个工具都能工作,但工具2的TCP(工具中心点)位置不对。当我将其改为夹取一个方块时,突然无法切换回工具1了。
非常感谢任何帮助!
测试模拟.vcmx(303.0 KB)
你好,具体是哪个操作不工作呢?
我尝试了 **DismountVac**、**MountGripper**、**DismountGripper**、**MountVac**,这些操作都是正常的。
您好,感谢您的回复!
对我来说,“MountGripper” 功能没有生效。机器人会移动到夹爪的位置,但没有抓取它,而是一直在等待“夹爪已关闭”的信号。
我再试一次,看看是不是只是个小故障,然后告诉你!
刚测试过:对我来说它不能正常工作https://youtu.be/IrUEFIfWy9Y
我已查看您的示例。安装新工具时,需要先移除原有工具。在您的情况下,只是隐藏了原有工具。
正如亚历山大所说,机器人无法在同一接口上安装两个工具。我尝试时,在执行MountGripper程序前使用了DismountVac
哦,现在我明白了。重置模拟时,机器人不会自动下马,对吧?
谢谢!
重置模拟将恢复到模拟开始前的状态。例如:模拟开始前,机器人已安装工具A;在运行过程中更换为工具B;重置模拟后,将恢复为已安装工具A的状态。
好的,我明白了,我之前也是这么想的。
现在我明白我的错误在哪里了——非常感谢大家!
你好。
请查看附上的示例文件。
我已配置好生成的夹爪并已将其附上。
Gripper_Example.vcmx(275.7 KB)
谢谢!现在可以正常工作了。![]()
有没有办法把这个问题标记为已解决?
据我所知,没有单独的方法能将问题标记为已解决。
很高兴听到这些信息对你有帮助。![]()
![]()
远程桌面支持 一般问题 amlandis3 2021年6月11日 上午4:341 为什么我们不能在Visual Components中使用远程桌面?...
2026-04-21visual Component General Questions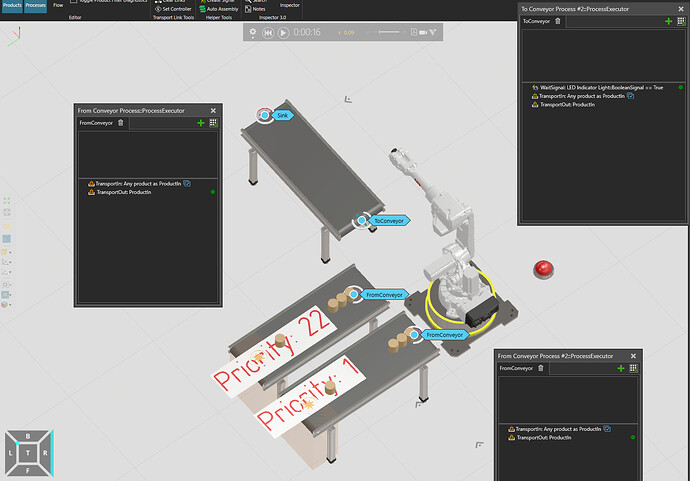
hans 2026年4月10日 上午7:211 关于进程转换的问题优先级。请看以下案例:...
2026-04-21visual Component Process Modeling
PartCreator 扩展与Python插件...
2026-04-21visual Component Extensions and Python Add-ons
jurel 2025年11月5日 上午8:171 你好, 我还有一个...
2026-04-21visual Component .Net Add-on Programming
RaycastSensor 无法正常工作的常见原因及解决方案 1. 配置问题 传感器未启用:确保在代码或配置文件...
2026-04-21visual Component Process Modeling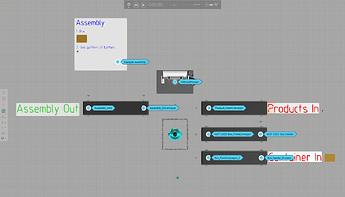
在手动流程中将产品装入容器作为装配 流程建模 中...
2026-04-21visual Component Process Modeling
我想请教一下,在VC5.0中如何使用MBD自动生成焊接程序。...
2026-04-21visual Component Robot Programming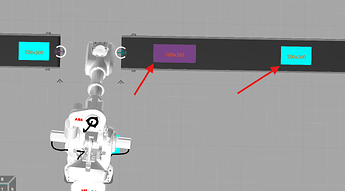
汉斯 2026年3月24日,下午2:301 我已在通用传送带上添加此脚本,用于监听产品被添加到传送带路径...
2026-04-21visual Component Python Programming
mastu 2023年5月10日,下午2:261 如果您在 KUKA.Sim(插件)或 KUKA OLP...
2026-04-21visual Component Extensions and Python Add-ons
上网淘巴领天猫淘宝优惠券,一年省好几千。
广告 ×您是本站第1538286名访客 今日有0篇新文章/评论

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~
