你好!
我正在尝试根据外部信号移动一个物体。该信号来自 SIMIT SP 11.2,信号工作正常,当我在 Simit 中更改它时,它会动态变化。
我尝试使用链接、伺服系统、信号映射和 Python 脚本来移动物体,但尚未成功。
实现此功能最简单的方法是什么?
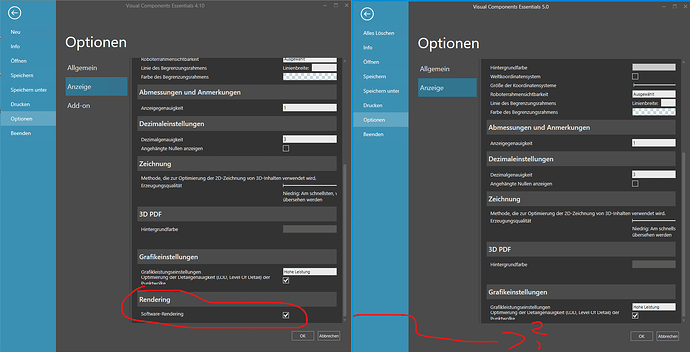
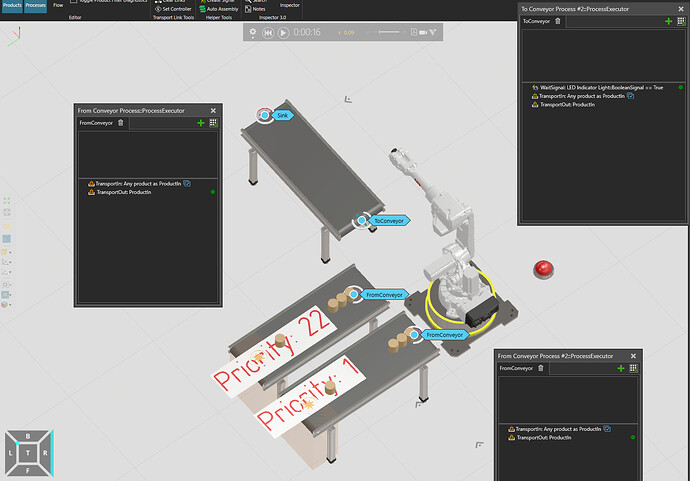
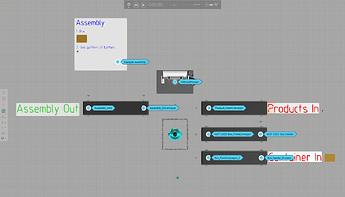
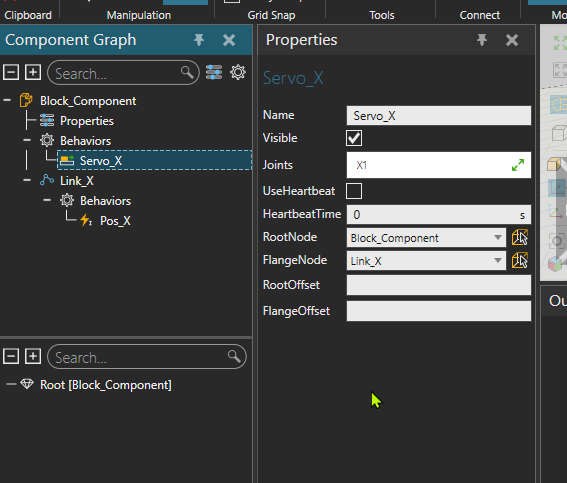
这是我目前的设置。我尝试不使用 Python,因为我不太擅长 Python 编程,需要借助 Vibe 编码。但我在 Vibe 编码方面也没有成功。
图片563×484 25.3 KB
图片567×483 23.1 KB
图片593×687 33 KB
图片595×488 23.6 KB
图片1920×1152 406 KB
谢谢
KustiH 2026年1月6日 12:582
你好,
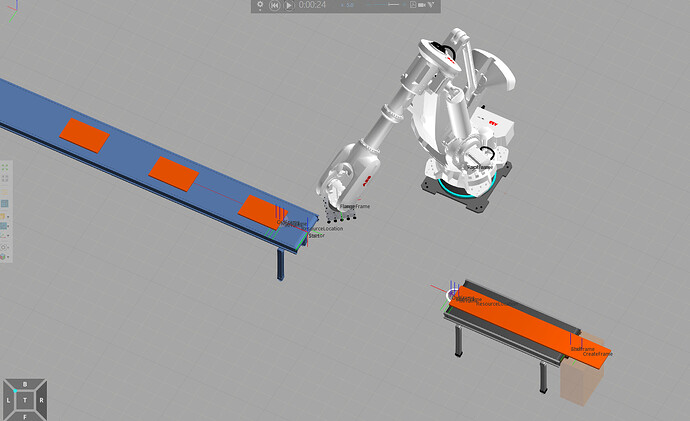
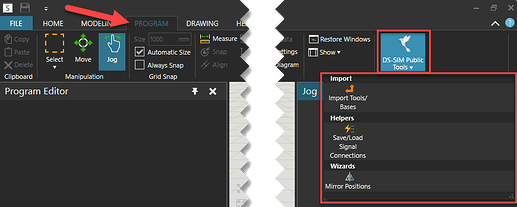
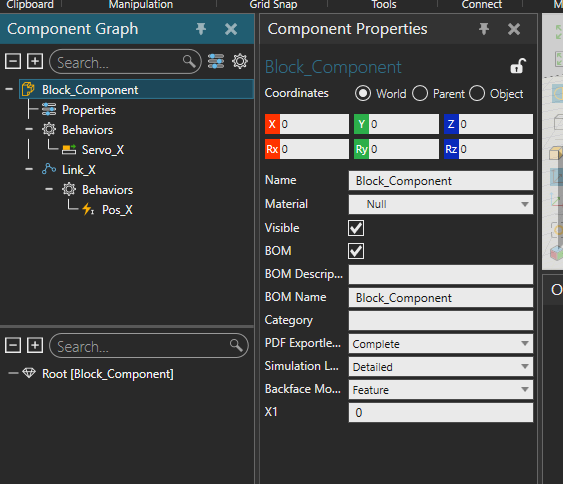
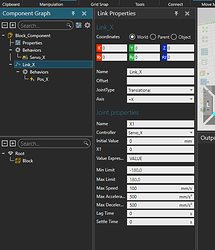
如果您希望连杆立即移动,可以简单地将服务器变量与关节X1的属性VALUE配对。如果我没记错的话,需要在“创建变量对”中同时选择“行为属性”和“自由度”,才能在伺服控制器下显示这些选项。
如果您想使用外部信号作为运动目标(并利用VC中定义的速度、加速度和减速度驱动伺服到达该目标),我建议您使用eCat类别“信号定位器”中的现有组件“平移轴”。将属性“模式”从“索引信号”更改为“轴信号”,它就会驱动到信号给定的位置。
1个赞
VincentNorican 2026年1月6日,下午1:093
您好!
You're very welcome! If you have any other questions or need further assistance, feel free to ask anytime. 😊
我想知道我是否在帖子里把自己的意思表达清楚了。
来自 SIMIT 的信号是一个介于 0 到约 10000 之间的整数。该值对应板材需要移动的毫米数,所有计算均在 SIMIT 中完成。
我只需要将该值“附加”到能够使 VC 中的物体移动的某个组件上。因此,如果信号 Pos_X 的值为 1000,那么物体应在 X 轴上移动 1 米。
这个解释并没有改变我的建议——我仍然认为你应当亲自尝试一下。
我的回答是基于普遍原则和常见情况,而你的具体情况(比如个人偏好、项目需求、技术环境等)可能需要你通过实践来验证。 
如果你愿意分享更多关于你遇到的挑战或具体情境的细节,我可以提供更有针对性的建议。 无论如何,祝你顺利!4
您好,
来自SIMIT的信号是关节的当前位置,还是伺服应该开始运动的运动目标?
我仍然坚持我之前的回复。既然你已经建立了连接,两种选项现在都相当简单,所以如果你不确定具体是哪一种,可以两种都尝试一下。
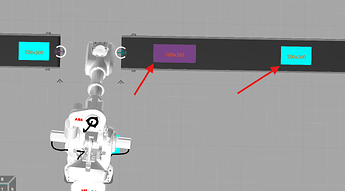
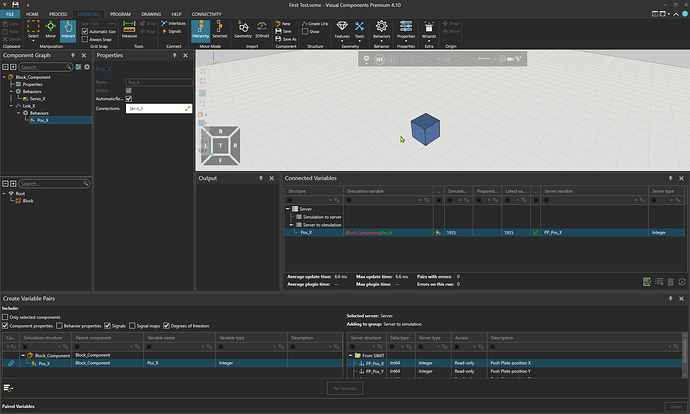
由于服务器变量是以毫米为单位的,你可以直接将其与关节值或实数类型的信号配对,因为它们同样是以毫米为单位。至少使用OPC UA插件时,整型服务器变量与实型仿真变量之间的配对和更新工作得非常好,因此我认为使用SIMIT插件也同样简单。
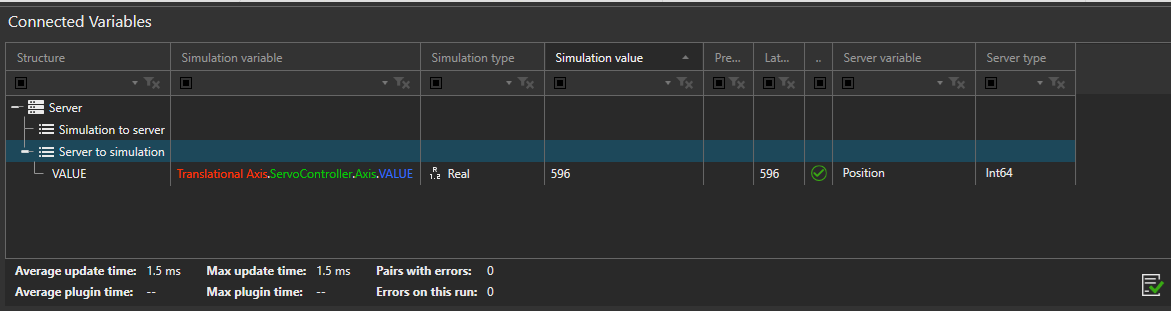
图像1171 × 311 = 364,181 (16.4 KB)
2 个赞
文森特·诺里坎 2026年1月7日 上午7:445
我已成功通过第一种方法将信号与联合VALUE配对。
感谢您的帮助,这对我非常有用!



 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~