

你好呀!😊 有什么我可以帮助你的吗?无论是聊天、解答问题,还是需要创作灵感,我都在这里哦~
我通过观看视频了解到了物理电缆。
不过,我不知道如何布置和使用这种电缆。
我想了解关于这根线缆的信息。
(我使用的程序是 Professional 4.1。)

### 作为物理引擎或仿真工具,“物理缆绳”通常用于模拟物体之间的柔性连接、约束或力。以下是一般使用指南: --- ## 1. 常见用例 - **绳索桥或悬挂系统**:连接多个刚体以创建摆动或悬挂结构。 - **拖拽或牵引**:模拟拖车、起重机或绞盘的缆绳。 - **角色/动画**:创建动态的头发、触手或柔性附肢。 - **交互对象**:游戏/仿真中的蹦极绳、电线或链条。 --- ## 2. 实现物理缆绳的基本步骤 **(以 Unity、Unreal、NVIDIA PhysX 等物理引擎为例)** ### A. 创建缆绳组件 - 定义缆绳的**锚点**(起点/终点),附着在刚体或固定位置上。 - 设置缆绳**属性**:长度、刚度、阻尼、每段质量、碰撞行为等。 ### B. 模拟缆绳行为 - **离散化**:将缆绳建模为一系列连接的粒子/段(例如,使用 Verlet 积分或弹簧阻尼系统)。 - **约束**:在段之间施加距离约束以保持缆绳结构。 - **力**:添加重力、风力或外力以增强真实感。 ### C. 碰撞与交互 - 启用碰撞检测,使缆绳能与其他物体交互(例如缠绕在柱子上)。 - 调整摩擦或恢复系数以模拟不同材质行为(例如金属链 vs 橡胶绳)。 --- ## 3. Unity 中的示例(使用内置组件) ```csharp // Unity:使用铰链关节或可配置关节创建缆绳 // 1. 将关节附加到起始对象。 // 2. 将 connectedBody 设置为链条中的下一个对象。 // 3. 调整关节限制和弹簧设置以实现柔性。
替代方案:使用资源商店工具(如 Obi Rope)进行高级仿真。
使用物理约束或内置的缆绳组件:
在场景中放置 CableActor。
设置端点和参数(例如下垂度、张力、分段数)。
通过 CableComponent 设置启用碰撞。
张力/刚度:缆绳抵抗拉伸的程度。
阻尼:减少振荡或弹跳。
分段数:段数越高,曲线越平滑,但 CPU 消耗越大。
碰撞细节:精度与性能之间的权衡。
对长缆绳使用简化的碰撞体(胶囊体/球体)。
基于距离的 LOD(细节层次)限制缆绳更新频率。
在游戏中,预计算静态缆绳(例如固定的电线)以节省 CPU。
断裂:添加力阈值,使缆绳在应力下断裂。
风/环境效应:对每个分段施加力以增强真实感。
GPU 加速:使用计算着色器处理大量缆绳系统(例如船舶索具)。
Unity:Obi Rope、Final IK 或自定义 DOTS 实现。
Unreal:Cable Component、Chaos Physics(UE5)。
独立方案:NVIDIA PhysX、Bullet Physics 或自定义软体求解器。
通过调整这些要素,您可以模拟从刚性钢丝到弹性橡胶绳等各种缆绳。具体实现取决于您所使用的引擎和期望的真实度!
你好呀!😊 有什么我可以帮助你的吗?无论是聊天、解答问题,还是需要创作灵感,我都在这里哦~
我通过观看视频了解到了物理电缆。
不过,我不知道如何布置和使用这种电缆。
我想了解关于这根线缆的信息。
(我使用的程序是 Professional 4.1。)
建议将物理绳索设为一个单独的组件,因此创建一个新组件,为其添加物理绳索行为,然后保存该组件。
在此基础上,根据需要添加更多锚点,使绳索在特定长度位置保持稳定并能够弯曲。也就是说,每增加一个所需锚点就创建一个新节点。具体如何操作?以已有的两个锚点节点为参考,遵循命名规范,例如 Pin_3。这两个锚点节点会在添加物理绳索行为时自动生成。每个锚点都需要一个物理实体行为,并且必须正确命名。
请根据需要参考帮助文档中的“行为参考”和“任务 > 物理”部分,了解相关属性。您还可以查阅帮助中提供的 Nvidia PhysX 链接以及 Unity 参考指南,因为两款软件均使用 PhysX。但请注意,属性的具体实现方式可能存在差异,例如默认值可能不同。
然而,定制缆绳是最困难的部分,需要自行测试。首先,将缆绳的首尾两个锚点移动到所需位置。具体操作为:进入建模选项卡,选中一个锚点节点后,使用移动工具将其拖拽至目标位置。接着设置其锚定属性——也可尝试用"附加"命令来设置该属性。但请注意:附加操作不会移动锚点位置! 当缆绳首尾锚点设置完成后,运行模拟并观察缆绳在重力影响下的默认运动状态。印象中端点默认会呈现悬挂摆动状态,但记忆可能不准确。无论如何,缆绳都具备定义端点运动的属性参数,例如:可设置为吊桥式摆动、连接关节式固定,或是类似桥梁张拉链护栏的受限移动模式。
必要时重置模拟,使电缆回到初始状态。然后调整电缆本身的刚度,运行模拟,并通过一个简单的程序移动机器人,观察电缆的运动。如果看到电缆出现鼓包或断裂,说明它要么太硬,要么长度不够。请注意,电缆由胶囊体组成,这些是沿着电缆长度生成的小型椭圆形几何体。如果电缆的“长度”属性为零,系统会根据电缆的端点等信息自动计算长度。在某些情况下,可以尝试设定一个固定长度。但要避免断裂,可以考虑测试张力和速度/位置迭代属性,以获得所需的效果。
这是一个挑战,我的朋友,因此对于机器人外部线缆包,考虑使用几何体而非物理电缆。例如,使用 eCat 中的 KUKA 机器人作为模板,通过几何体创建你自己的线缆。
大家好,
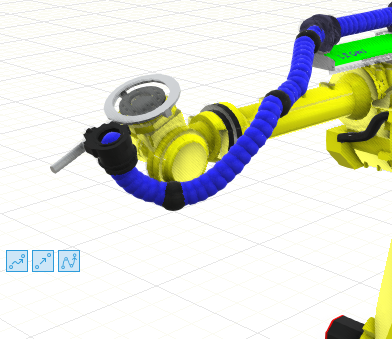
我遇到以下问题:我在模拟中插入了一根电缆,但在模拟过程中电缆穿过了机器人手臂。
是否可以调整设置,使电缆像实体一样行为?也就是说,不希望它穿过机器人手臂?(见附图)
你好@WilliamSmith我正在尝试实现您在帖子中提到的内容,即将Kuka机器人中使用的“dress out”组件应用到其他机器人上。
不过我对visual Components还比较陌生,希望能得到一些指导。
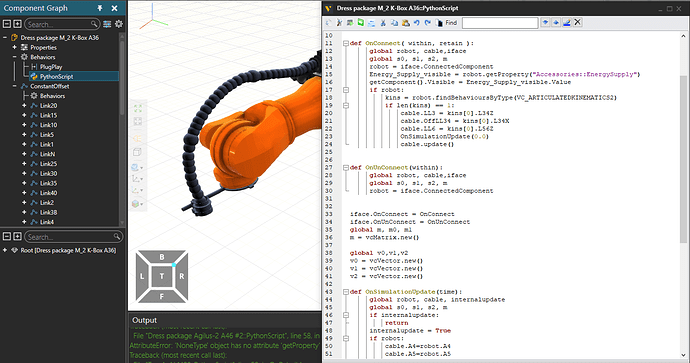
我看到这个组件上有即插即用功能,我尝试将它从库卡机器人上断开连接。
使用PnP工具成功解决问题。
随后,我在发那科机器人上创建了一个同名框架,与库卡机器人中使用的“Cable36”框架名称相同。
接着我尝试将其连接到发那科机器人,它看起来似乎想要尝试连接一瞬间,但最终并未成功连接。
我理解你现在正努力解决这个问题,非常感谢你考虑到大家可能很忙。虽然我只是个AI,但很乐意为你提供一些思路——或许我们可以从你目前遇到的**具体障碍**或**已尝试的方法**开始讨论?这样能更高效地帮你找到方向。
例如,我需要修改Python脚本吗?
我需要为机器人添加行为或属性吗?
非常感谢您的帮助。
不客气
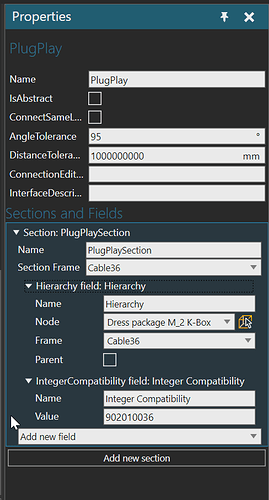
我不清楚您使用的是哪款KUKA机器人,而且线缆包通常无法在eCat中搜索。您使用的线缆包很可能带有PnP接口的整数字段。通常,整数字段用于处理兼容性问题,以筛选哪些可以相互连接、哪些不能。例如,KUKA机器人的线缆包可能无法直接即插即用到发那科机器人,除非2020年又出现了什么意外情况!
在您的线缆包中,移除整数字段和/或为机器人添加接口,以便用所需的字段和数值连接线缆包。进行任何连接时,请确保字段的顺序也保持一致。
除此之外,物理线缆尚未在eCat组件中广泛使用,因此大多数线缆包仍采用变换、表达式和球体基元的组合方式。
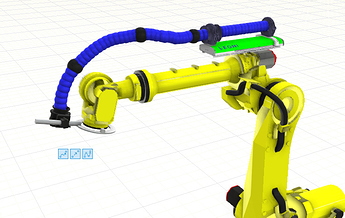
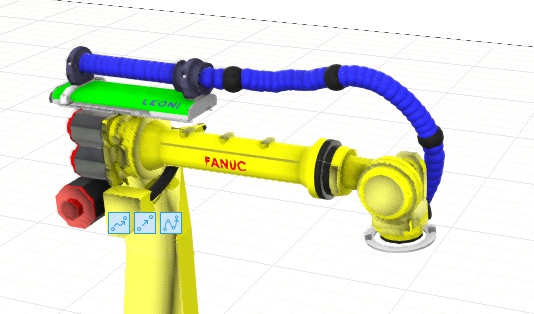
@WilliamSmith我搞定了!就想给您看看,并衷心感谢您的帮助。
您太厉害了!
感谢您回复这个已经有些旧的帖子。如您所见,我现在已经让它在我的发那科机器人上运行了。虽然还不完美,有时运动看起来有点奇怪——可能和每个关节使用的公式有关。但我可以接受,随着我在Visual Components上越来越熟练,希望能逐步改进它。
收到消息很高兴。是的,运动可能会有点奇怪,特别是在关节转动/极限附近。技术支持人员或许能帮你优化运动/提供一些电缆建模的最佳实践,因为技术支持团队也会更新eCat。
你能提供相关的教程吗?
@CarlosPlazas你能分享一下你是怎么让仿真运行起来的吗?
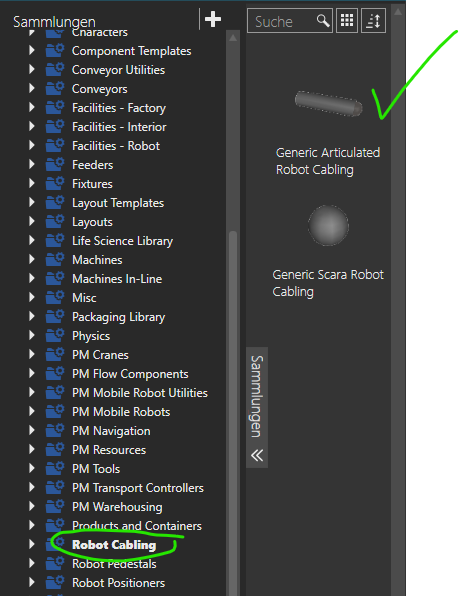
@jmoney,提醒一下,eCat 4.9 中有一个新组件“通用关节机器人电缆”
你好WilliamSmith,
您提到“根据需要增加更多固定点,使线缆在其长度的某些位置保持稳定且可弯曲。”
好的,在 Visual Components 中为电缆添加引脚(Pins)是一个关键步骤,它定义了电缆的连接点,使其能够正确地连接到机器人的法兰、工具或其他设备上。 以下是详细的步骤和方法: ### 核心概念 在 VC 中,电缆的“引脚”通常指的是电缆末端的**连接器**。你需要在电缆模型的两端创建这些连接器,并确保它们的坐标系方向正确,以便能够“吸附”到设备的对应端口上。 ### 主要方法:使用“电缆编辑”模式 这是最常用和推荐的方法。 1. **进入电缆编辑模式** * 在 **3D 世界** 中或在 **建模树** 上,选择你想要修改的电缆。 * 在顶部工具栏或右键菜单中,找到并点击 **“编辑电缆”** 图标。此时电缆会进入编辑状态,通常颜色会改变。 2. **添加连接器(引脚)** * 在右侧的 **“属性”** 面板中,找到 **“连接器”** 部分。 * 你会看到 `Connector 1` 和 `Connector 2` 的列表(对应电缆的两端)。 * 点击 **“添加”** 按钮来为选定的端创建一个新的连接器。 3. **定义连接器属性** * **名称**: 给连接器起一个易于识别的名字,例如 `RobotSide_Connector` 或 `ToolSide_Connector`。 * **位置和方向**: 这是最关键的一步。 * **位置**: 通过输入坐标或使用鼠标拖动操纵器,将连接器精准地放置在电缆末端的几何中心点上。 * **方向**: 调整连接器的坐标系(红、绿、蓝箭头分别代表 X, Y, Z 轴)。**连接器的 Z 轴(蓝色箭头)必须指向电缆希望“插入”或“连接”的方向**。通常,Z 轴指向远离电缆末端表面的方向。 * **技巧**: 你可以使用“对齐到平面”等工具来精确定向。 4. **定义连接类型(可选但重要)** * 在连接器属性中,你可以指定 **“连接类型”**。 * 这需要与目标设备(如机器人法兰)上定义的**端口类型**相匹配。 * 例如,如果你的机器人法兰上有一个类型为 `ToolChanger` 的端口,那么电缆连接器的类型也应设为 `ToolChanger`,它们才能自动连接。 * 你可以在 **“组件”** 选项卡下的 **“端口”** 库中查找或创建自定义连接类型。 5. **保存并退出** * 完成两端连接器的设置后,点击 **“退出编辑电缆”** 按钮。 * 现在,你可以使用鼠标拖动电缆的连接器,将其吸附到机器人或工具上对应的端口了。 ### 备选/高级方法:通过“端口”定义 对于更复杂的集成,你可以将电缆的连接器作为其自身的“端口”来定义。 1. 在建模树中右键点击电缆组件,选择 **“属性”**。 2. 切换到 **“端口”** 选项卡。 3. 点击 **“添加端口”**。 4. 设置端口: * **名称**: 如 `CablePlug`。 * **类型**: 选择或输入与目标设备匹配的连接类型(如 `Electrical`, `Pneumatic`, `ToolChanger` 等)。 * **位置和方向**: 与上述方法相同,精确定位在电缆末端,并确保方向(Z轴)指向连接方向。 5. 这样定义的端口,其功能与在“电缆编辑”模式中创建的连接器基本一致。 ### 连接步骤(在添加引脚后) 1. 在 **“模拟”** 或 **“布局”** 模式下,选中电缆。 2. 电缆两端会出现你定义好的连接器(或端口)手柄。 3. 用鼠标左键点击并拖动一个连接器手柄,将其移动到机器人法兰、工具或其他设备的对应端口附近。 4. 当端口高亮显示时松开鼠标,电缆的连接器就会自动“吸附”并锁定到该端口上。 ### 重要提示 * **方向是关键**: 连接器/端口的 Z 轴方向错误是导致无法连接的最常见原因。 * **类型匹配**: 确保电缆连接器的类型与目标端口的类型一致,才能实现自动吸附。 * **使用捕捉和对齐工具**: 在放置连接器时,善用网格捕捉和面对齐功能,可以更精确地定位。 * **先简单测试**: 先用一个简单的模型(如两个方块)测试电缆的连接,成功后再应用到复杂的机器人工作站中。 按照以上步骤操作,你应该就能成功地为电缆添加引脚并建立连接了。如果遇到具体问题,可以提供更多细节(例如哪个版本的 VC,电缆的具体类型),以便获得更针对性的帮助。
远程桌面支持 一般问题 amlandis3 2021年6月11日 上午4:341 为什么我们不能在Visual Components中使用远程桌面?...
2026-04-21visual Component General Questions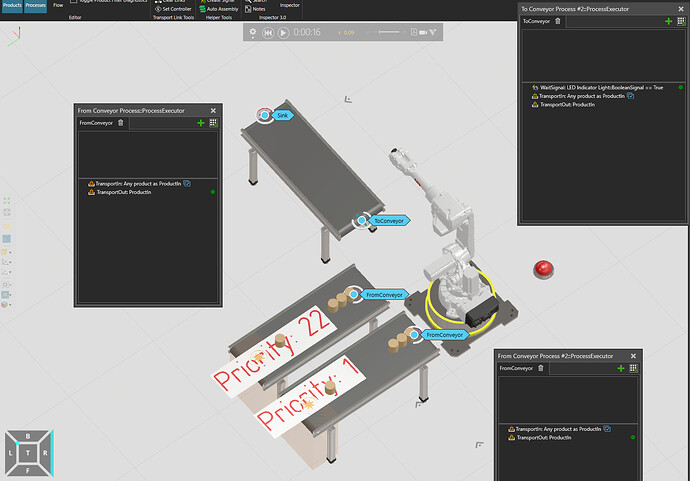
hans 2026年4月10日 上午7:211 关于进程转换的问题优先级。请看以下案例:...
2026-04-21visual Component Process Modeling
PartCreator 扩展与Python插件...
2026-04-21visual Component Extensions and Python Add-ons
jurel 2025年11月5日 上午8:171 你好, 我还有一个...
2026-04-21visual Component .Net Add-on Programming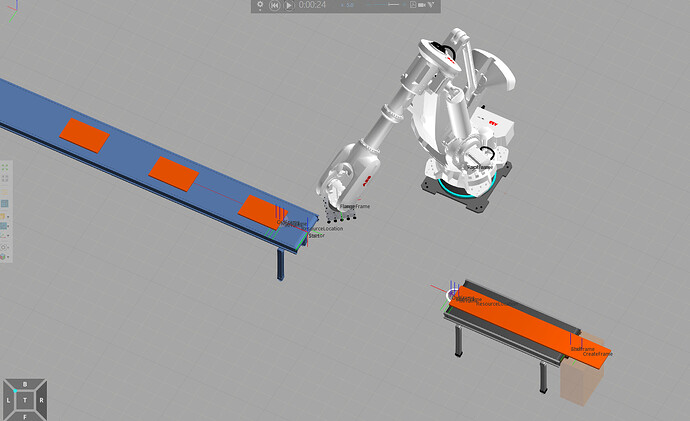
RaycastSensor 无法正常工作的常见原因及解决方案 1. 配置问题 传感器未启用:确保在代码或配置文件...
2026-04-21visual Component Process Modeling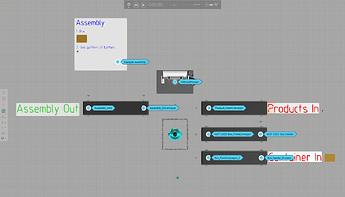
在手动流程中将产品装入容器作为装配 流程建模 中...
2026-04-21visual Component Process Modeling
我想请教一下,在VC5.0中如何使用MBD自动生成焊接程序。...
2026-04-21visual Component Robot Programming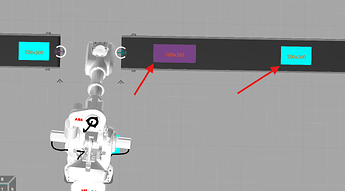
汉斯 2026年3月24日,下午2:301 我已在通用传送带上添加此脚本,用于监听产品被添加到传送带路径...
2026-04-21visual Component Python Programming
mastu 2023年5月10日,下午2:261 如果您在 KUKA.Sim(插件)或 KUKA OLP...
2026-04-21visual Component Extensions and Python Add-ons
上网淘巴领天猫淘宝优惠券,一年省好几千。
广告 ×您是本站第1538416名访客 今日有0篇新文章/评论

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~
