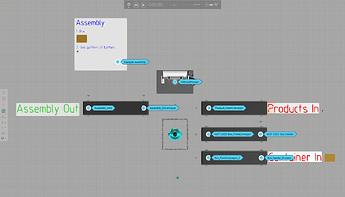
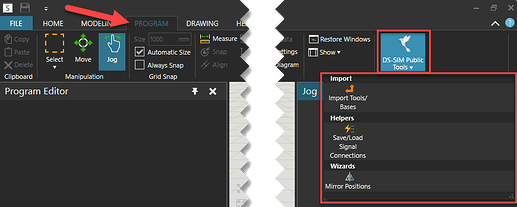
在对机器人进行离线编程时,校准至关重要。VC中的标准工具允许您以数值方式输入工具和基坐标系的值,这使您能够将真实机器人的坐标系与仿真模型同步。此机器人校准插件为单元校准提供了一些辅助工具。该插件包含零件校准和工具校准工具。
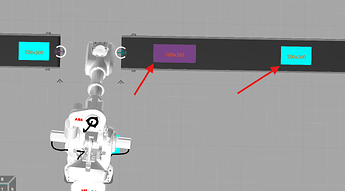
零件校准根据测量数据定位仿真组件。您需要两组测量点,一组来自真实机器人,另一组来自仿真机器人。然后比较这两组数据,并根据点集之间的偏移量移动所选组件。使用最小二乘法拟合来计算偏移量。此外,还有一个工具可通过CSV文件导入真实机器人的测量点。或者,如果该机器人品牌支持上传插件,您也可以使用机器人上传器来上传位置数据。
工具校准允许您根据测量数据设置工具坐标系的位置和方向。当真实机器人无法进行工具校准,因而无法将工具坐标系从真实机器人同步到仿真模型时,此工具非常有用。此时可在仿真模型上校准工具坐标系,然后将其从仿真模型同步到真实机器人。
提供零件校准和工具校准的视频教程。插件本身及教程链接如下。
插件:
RobotCalibration_13_09_2021.zip视频教程:
https://visualcomponents.sharefile.com/d-sbd358150b0fd4dd788421419a16c3d01
好的,我明白了。 请问有什么可以帮助您的吗?无论是翻译、解释、回答问题,还是其他任务,我都很乐意协助。请随时告诉我您的需求。

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~