

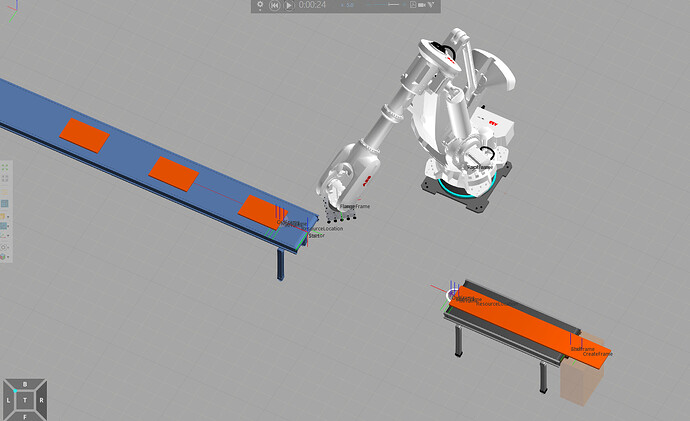
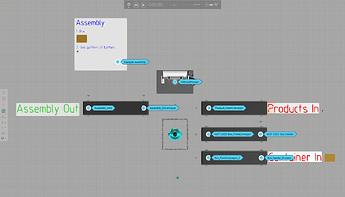
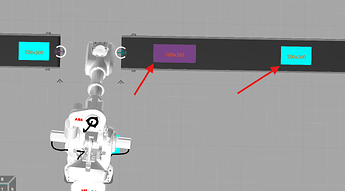
我正在建模一个用于夹取圆环的夹爪。夹爪有3个连杆:2个用于夹指,1个用于上下移动。夹取后,输出设为抓取状态时,夹爪能抓住圆环,但圆环应随夹爪一起移动。然而当夹爪上下移动时,圆环却停留在原位。有人能帮忙吗?
关于使用夹爪连杆移动物体 —— 组件建模 - visual compents 疑难解答
2026-04-07
新闻来源:网淘吧
围观:1027
电脑广告
手机广告


 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~文章底部电脑广告
手机广告位-内容正文底部
相关文章
-
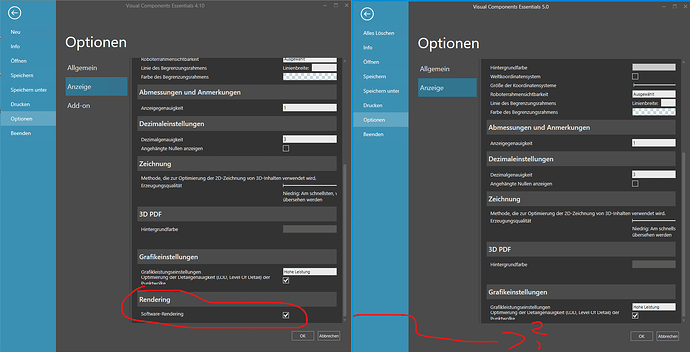
Visual Components远程桌面问题解决指南:许可证限制与软件渲染设置 - General Questions - visual compents 疑难解答
远程桌面支持 一般问题 amlandis3 2021年6月11日 上午4:341 为什么我们不能在Visual Components中使用远程桌面?...
2026-04-21visual Component General Questions -
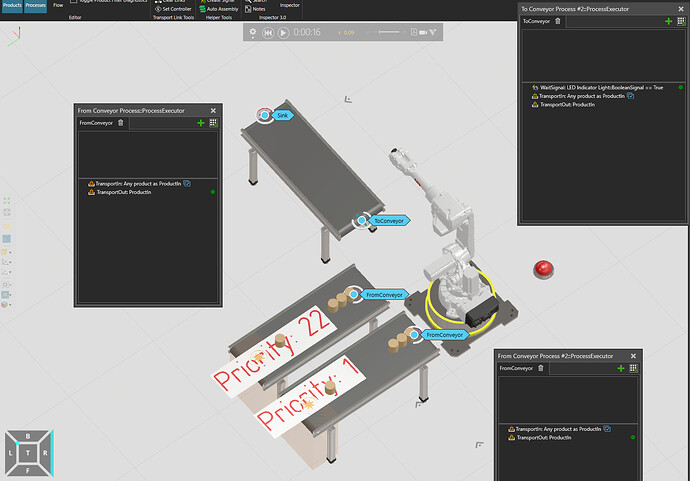
进程转换优先级详解:为何设置无效及容量拉动流程解决方案- Process Modeling - visual compents 疑难解答
hans 2026年4月10日 上午7:211 关于进程转换的问题优先级。请看以下案例:...
2026-04-21visual Component Process Modeling -
PartCreator插件教程:用Python在CAD中创建自定义文字组件与多语言支持 - Extensions and Python Add-ons - visual compents 疑难解答
PartCreator 扩展与Python插件...
2026-04-21visual Component Extensions and Python Add-ons -

.NET插件开发:如何访问ComponentAddedEventArgs中的组件属性并获取名称 - .Net Add-on Programming - visual compents 疑难解答
jurel 2025年11月5日 上午8:171 你好, 我还有一个...
2026-04-21visual Component .Net Add-on Programming -
RaycastSensor故障排除指南:原因分析与解决方案 - Process Modeling - visual compents 疑难解答
RaycastSensor 无法正常工作的常见原因及解决方案 1. 配置问题 传感器未启用:确保在代码或配置文件...
2026-04-21visual Component Process Modeling -
手动装配流程建模指南:如何正确模拟产品装箱与组装 - Process Modeling - visual compents 疑难解答
在手动流程中将产品装入容器作为装配 流程建模 中...
2026-04-21visual Component Process Modeling -

VC5.0 MBD自动生成机器人焊接程序实战指南 - Robot Programming - visual compents 疑难解答
我想请教一下,在VC5.0中如何使用MBD自动生成焊接程序。...
2026-04-21visual Component Robot Programming -
解决Python中vcMotionPath OnPhysicalTransition事件不触发问题 - Python Programming - visual compents 疑难解答
汉斯 2026年3月24日,下午2:301 我已在通用传送带上添加此脚本,用于监听产品被添加到传送带路径...
2026-04-21visual Component Python Programming -
提升KUKA机器人仿真效率:DS-SIM公共工具扩展与Python插件详解 - Extensions and Python Add-ons - visual compents 疑难解答
mastu 2023年5月10日,下午2:261 如果您在 KUKA.Sim(插件)或 KUKA OLP...
2026-04-21visual Component Extensions and Python Add-ons


