尊敬的支持团队,
我正在进行一个仿真项目,涉及一条有20个机器人和20个停工站的输送线。每个机器人执行不同的操作,具体取决于所选的SKU。由于每个SKU的几何形状不同,每个机器人都需要相应的SKU特定程序。此外,每个站点包括根据所处理SKU模型而变化的子装配体。

我希望了解如何在以下条件下高效地仿真多个SKU:
-
当选择一个SKU时,仿真应自动加载该SKU的正确几何形状。
-
所有20个机器人应自动切换到相应的SKU特定机器人程序,而无需人工干预。
-
每个站点应显示并使用正确的SKU特定子装配体。
-
我希望避免在每个站点手动隐藏或显示SKU模型或子装配体。
-
整个流程应支持无缝的SKU切换和程序选择与模型替换的全自动化。
请建议是否有推荐的工作流程、变体管理方法或自动化配置流程能够实现这一点。任何最佳实践、文档或示例都将不胜感激。
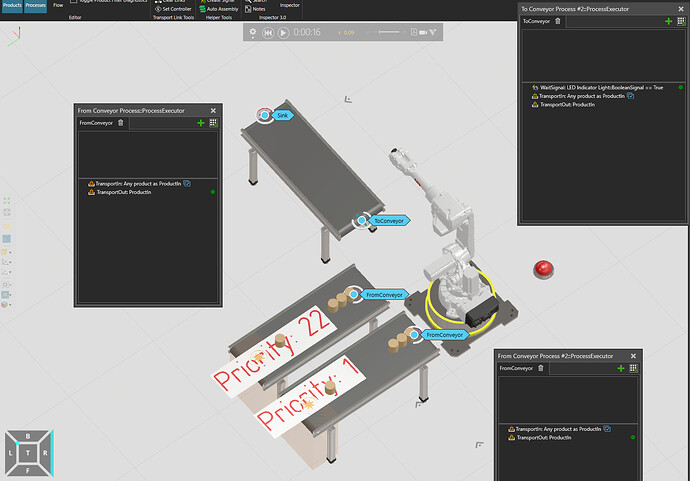
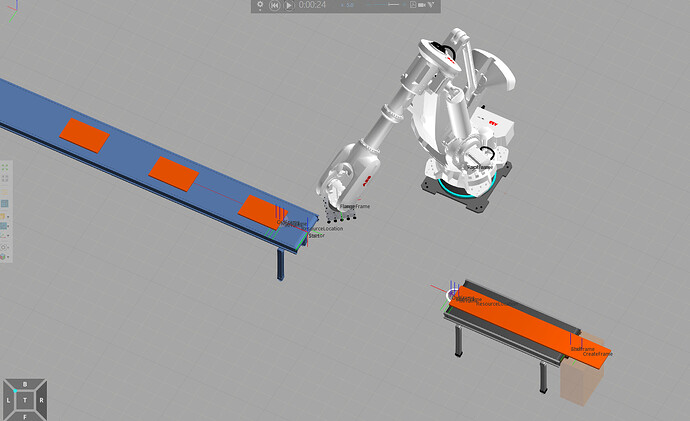
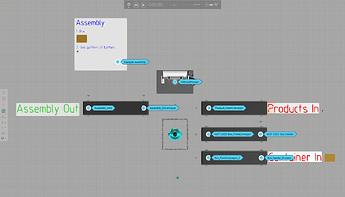
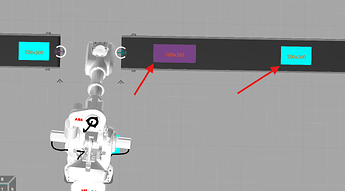
感谢您的支持。 此致, Mohit Keshav Tilma 2026年2月3日 下午3:40 您没有说明有多少个SKU/产品。 如果少于5个,我可能会为每个SKU创建一个单独的流程,并对应相应的产品和子装配。这样您可以为每个产品选择不同的几何形状,并定义该SKU/产品特有的流程。 如果超过5个,我可能会尝试创建一个具有不同属性的单一产品。eCat中的“自动仓库系统”布局展示了一个很好的例子: 使用组件“Excel读取器”(eCat → 杂项)或 **变量缓存插件** 您可以从Excel文件中读取数值。这样您可以只创建一个产品,并在流程中定义何时创建它、使用哪个SKU、哪种颜色/尺寸、需要多少处理时间等。 图表 ```

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~