

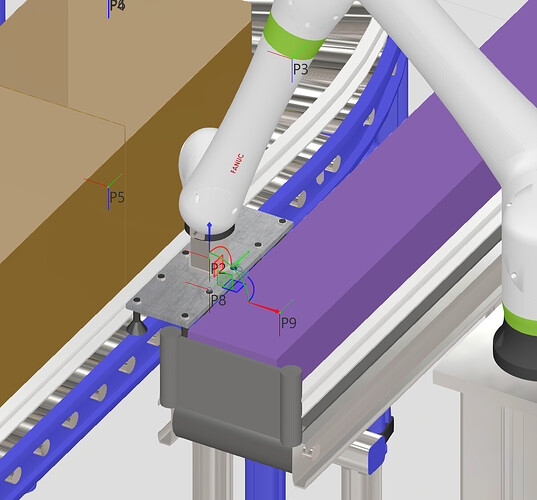
有没有一种简单的方法可以让我累积5个产品,然后让机器人将它们滑动过去(将下图中的P8移动到P9)?目前机器人只是逐个处理产品——我是否需要让纸箱表现得像固体一样……
有没有一种简单的方法可以让我累积5个产品,然后让机器人将它们滑动过去(将下图中的P8移动到P9)?目前机器人只是逐个处理产品——我是否需要让纸箱表现得像固体一样……
你指的是类似这样的操作吗?
如果是的话,你可以尝试使用传送带传感器,将其设置为“计数零件”模式,在5个产品通过后接收信号。然后稍作调整,在夹爪侧面添加一个工具中心点(TCP),抓取所有产品并将它们滑动到一侧(你需要在机器人属性中启用“多重抓取”功能(在“信号动作”下),并在机器人属性中增加检测体积(在“动作配置”下))。你可以在“排除释放目标”中选择传送带,这样侧面的零件就不会阻碍新零件到达传送带上它们旁边的位置。
使用机器人滑动产品.vcmx(1.7 MB)
或者,你也可以使用“捆绑点”功能(eCat → 传送带实用工具)将5个产品在传送带上捆绑在一起,从而更容易同时抓取它们。
或者尝试使用物理功能,但这会稍微复杂一些。
Thanks very much - that is perfect. I knew there were a couple ways to tackle this and I thought I would need to deal in the ‘Physics’ world.
远程桌面支持 一般问题 amlandis3 2021年6月11日 上午4:341 为什么我们不能在Visual Components中使用远程桌面?...
2026-04-21visual Component General Questions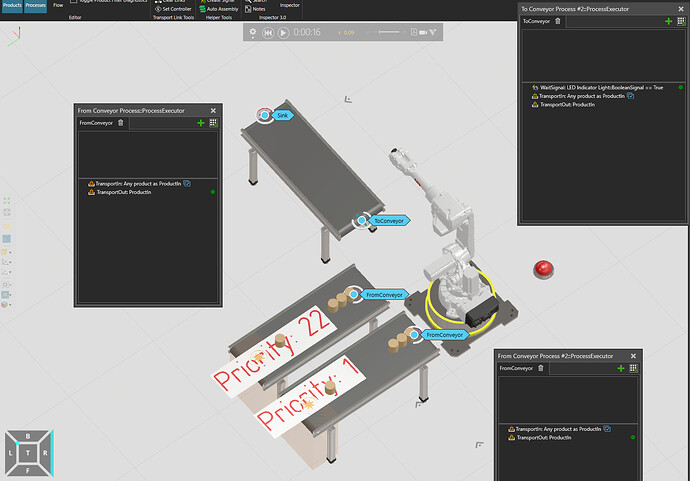
hans 2026年4月10日 上午7:211 关于进程转换的问题优先级。请看以下案例:...
2026-04-21visual Component Process Modeling
PartCreator 扩展与Python插件...
2026-04-21visual Component Extensions and Python Add-ons
jurel 2025年11月5日 上午8:171 你好, 我还有一个...
2026-04-21visual Component .Net Add-on Programming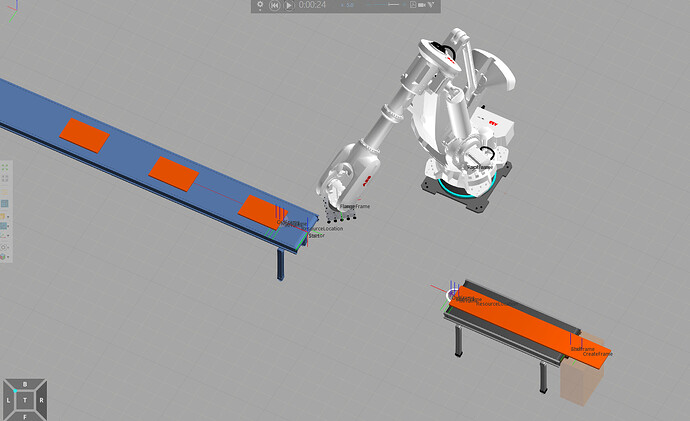
RaycastSensor 无法正常工作的常见原因及解决方案 1. 配置问题 传感器未启用:确保在代码或配置文件...
2026-04-21visual Component Process Modeling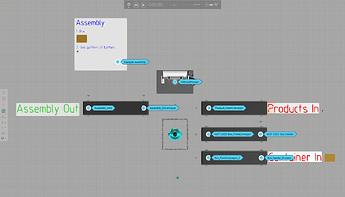
在手动流程中将产品装入容器作为装配 流程建模 中...
2026-04-21visual Component Process Modeling
我想请教一下,在VC5.0中如何使用MBD自动生成焊接程序。...
2026-04-21visual Component Robot Programming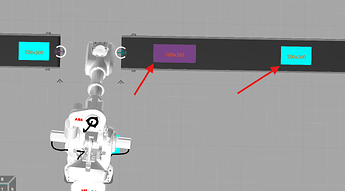
汉斯 2026年3月24日,下午2:301 我已在通用传送带上添加此脚本,用于监听产品被添加到传送带路径...
2026-04-21visual Component Python Programming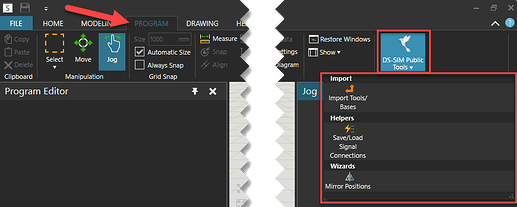
mastu 2023年5月10日,下午2:261 如果您在 KUKA.Sim(插件)或 KUKA OLP...
2026-04-21visual Component Extensions and Python Add-ons
上网淘巴领天猫淘宝优惠券,一年省好几千。
广告 ×您是本站第1538335名访客 今日有0篇新文章/评论

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~
