rprasann 2026年2月25日 下午8:001
您好,
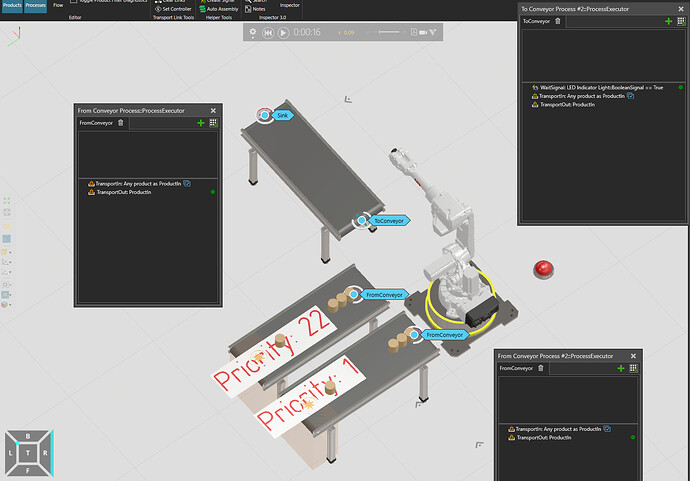
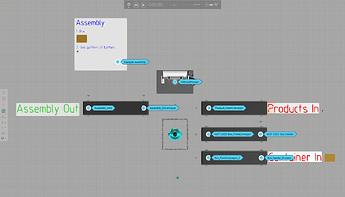
我正在研究一个场景:希望基于时间分布模拟芯片料箱填满的过程。一旦填满,AMR(自主移动机器人)将取走料箱,将其倒入清空区,然后将空料箱放回缓冲区。我使用了流程节点来处理料箱流程、清空区和缓冲区。我在料箱流程节点和缓冲区之间设置了信号——基于时间延迟,信号发送到缓冲区,这将启动AMR取走一个料箱,将其循环运送到清空区再送回缓冲区。然而,我遇到的问题是每次只能运输一个料箱。我希望将此过程扩展到多台并行机器——因此需要多台AMR协同工作,一些AMR从机器上取走满箱,另一些AMR用缓冲区中的空箱进行补充。有没有办法可以模拟容量拉动机制,使多台AMR协同工作?如有任何帮助,将不胜感激。
TestSimNew.vcmx(1.6 MB)
Tilma 2026年2月26日 下午2:262
您好,我不太确定是否理解正确,但如果您希望AMR去取回新产品,在实际产品完成并需要运送到下一工序之前,您可以采用两种方法:一是在机器前设置两个工序作为缓冲区;二是尝试使用 **StartTransportIn + WaitTransport** 方法,类似于 eCat 中的“双夹爪机器看管”布局模板。
从帮助文件中得知:
StartTransportIn 语句允许您启动将一个或多个产品实例运输到工序中,并在运输过程中执行其他语句。
TestSim_with StartTransportIn.vcmx(1.8 MB)
rprasann 2026年2月26日 下午4:103
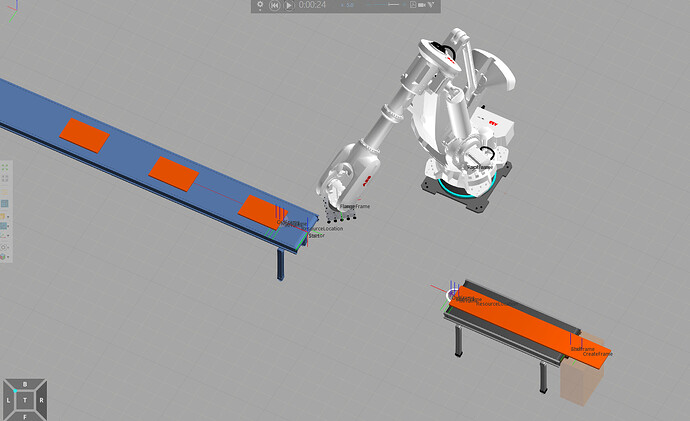
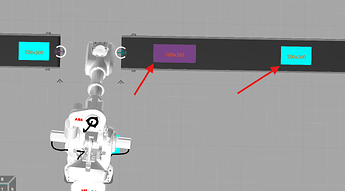
感谢 Tilma,另外我们将使用具备全向移动能力的AMR。有没有办法控制AMR的导航,使其在特定路径上能够横向移动,而不是直行?
rprasann 2026年2月26日 下午4:264
我的意思是,为了避免撞到柱子,能否强制AMR保持当前朝向,先向左移动,再向前,然后向右?
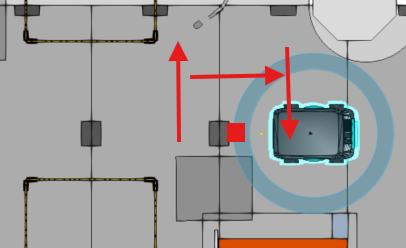
image406×248 28.9 KB
JohnKim 2026年2月27日 上午6:425
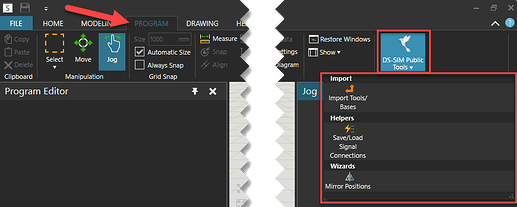
我认为仅靠基本提供的流程建模功能实现起来比较困难,但或许可以通过任务控制器(Mission Controller)实现。
luhan 2026年2月27日 上午7:076
@rprasann 目前 VC 对应的是 MR 模块,没有 AMR 模块,因此使用 MR 来实现 AMR 功能可能无法实现或较为困难!



 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~