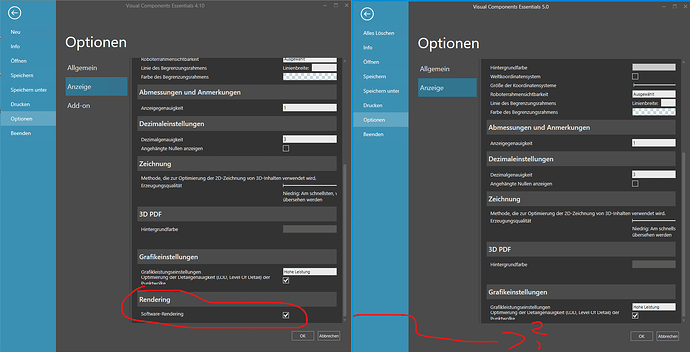
visual Components 5.0 已正式发布。这意味着我们将继续更新 5.0 版本的 eCat,而 4.10 版本的 eCat 将停止更新。
新版本引入了多项新功能,例如 Python 3 API、新型运动控制器和碰撞体。这些更新同样影响电子目录。我们正在将现有模型的脚本升级至 Python 3。这是一个长期过程,但已有部分组件开始使用新 API。更新后的组件功能与之前保持一致。重大更新可能伴随潜在的回归问题,如果您遇到任何错误,请联系我们的技术支持 (support@visualcomponents.com)。
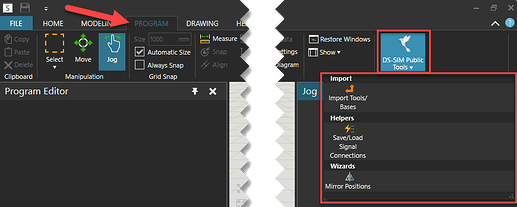
新型运动控制器目前以测试版形式推出。在 eCat 中,您可以启用名为“运动控制器(测试版)”的额外资源库,其中包含部分使用新控制器的六轴机器人、外围设备和演示布局。这些资源可供测试新控制器功能。采用独立资源库是因为并非所有功能都兼容新控制器,例如 PM 传输控制器和 OLP 功能暂不支持。新控制器的全面兼容将在后续版本中实现。目前我们建议分开使用新旧控制器模型,以最大限度减少兼容性问题。以下视频演示如何在 eCat 中启用运动控制器资源库。
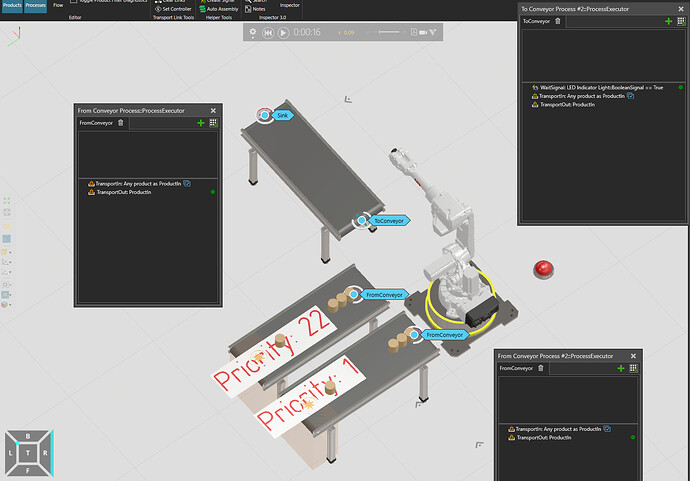
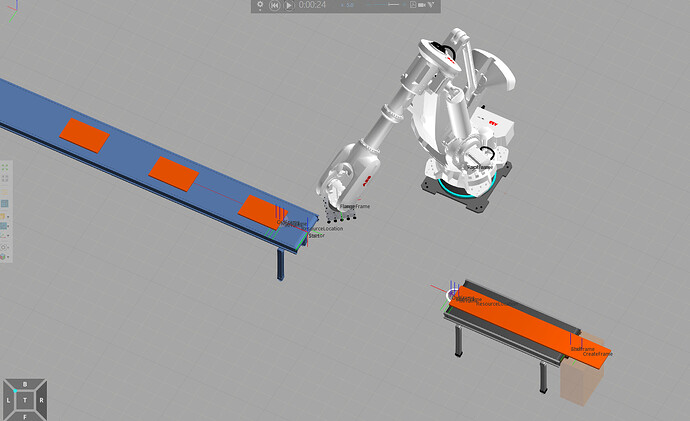
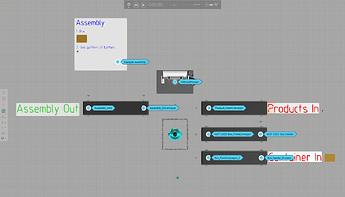
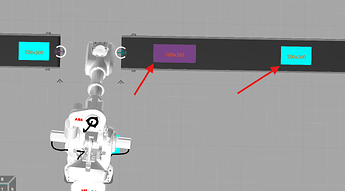
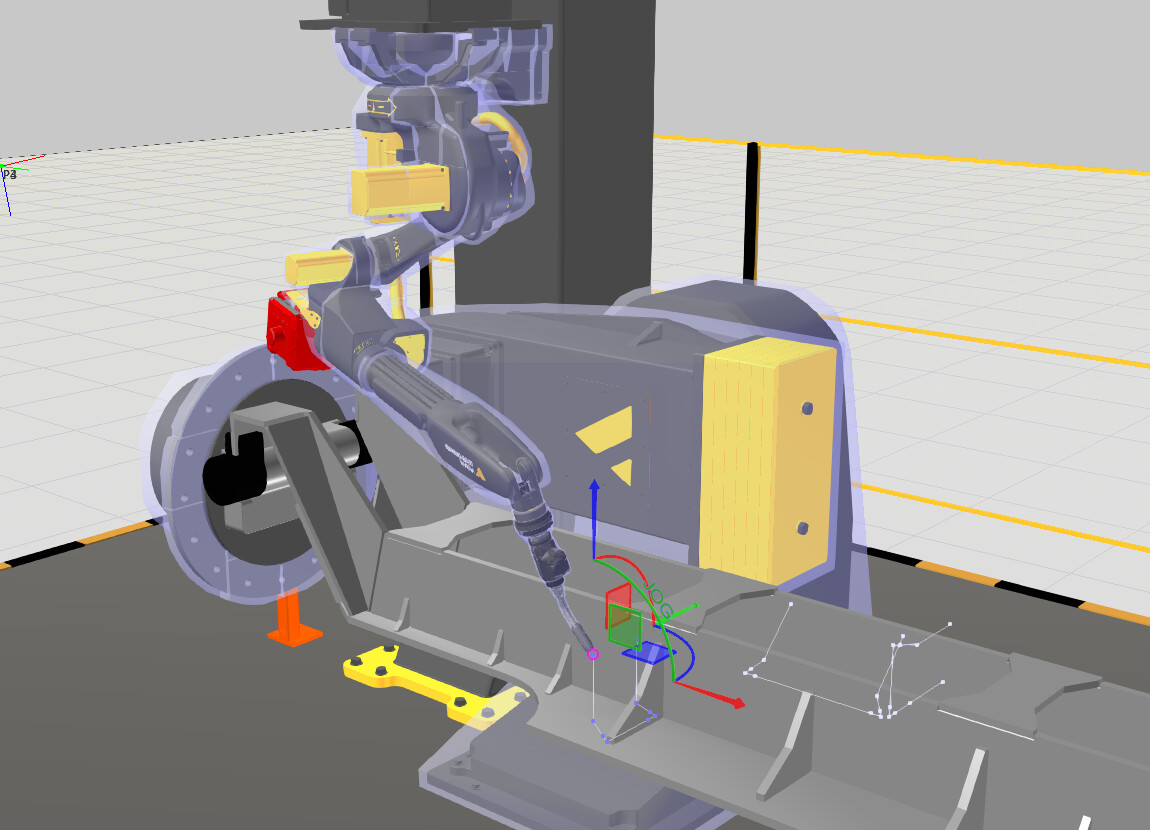
碰撞体功能可提升特定场景效率,例如在 OLP 中加速碰撞检测。在 eCat 的布局 OLP在以下图片所示的示例布局中,可以看到许多使用碰撞体(colliders)的情况。
需要注意的是,升级到 5.0 平台时,vcmx 格式发生了较大变化,旧版本无法使用 5.0 的模型。这在 VC 的主要版本更新中很常见,但在 5.0 中尤为突出。与他人协作时,请确保使用相同的平台。旧模型可以在 5.0 中运行,但若要将布局迁移到新平台,请参考以下关于迁移的帖子:
-k

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~