大家好,
我是一名学生,目前正在完成我的学士学位论文项目(布加勒斯特理工大学,工业工程与机器人学院)。我的目标是根据一个真实的参考案例,重新创建一个复杂的BIW(白车身)焊接单元仿真。
背景:我正在根据这个视频重新构建这个单元:https://www.youtube.com/watch?v=48m_RvzMCcM
挑战:我已经成功导入并配置了我自己的 CAD 几何体(机器人第7轴、自定义线性导轨、自定义升降器/定位器)。然而,我完全卡在了流程建模阶段。我不知道如何让我的自定义导入几何体与流程流协同工作。我不想用标准的 eCatalog 组件(如通用输送机或供料器)替换我的模型,因为我需要我设计中的特定组件。
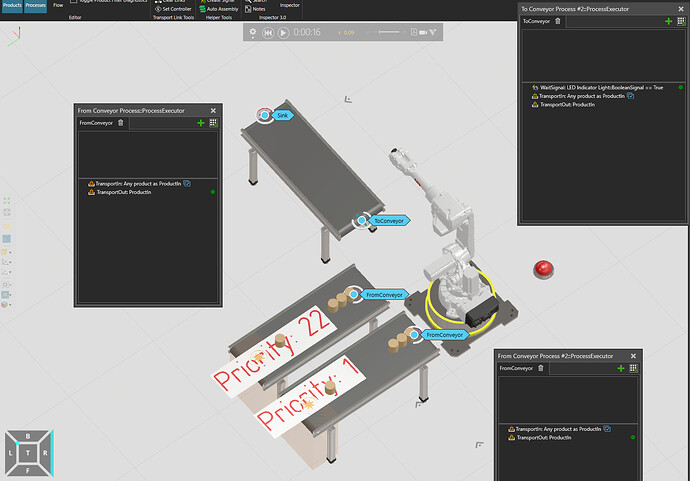
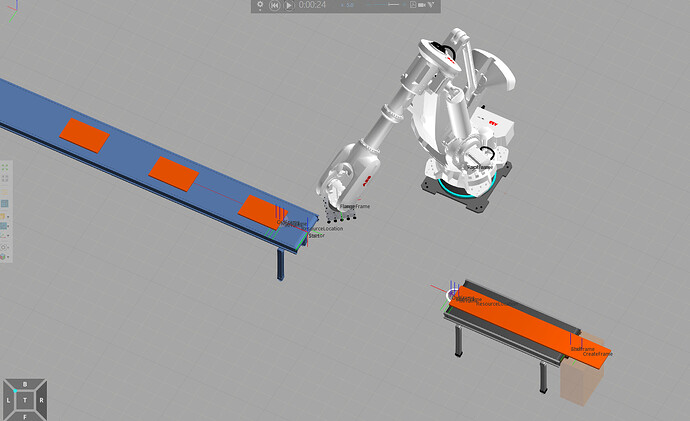
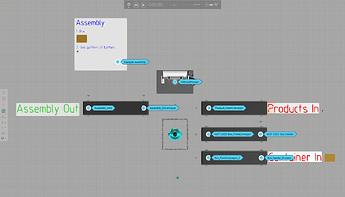
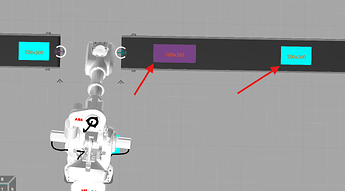
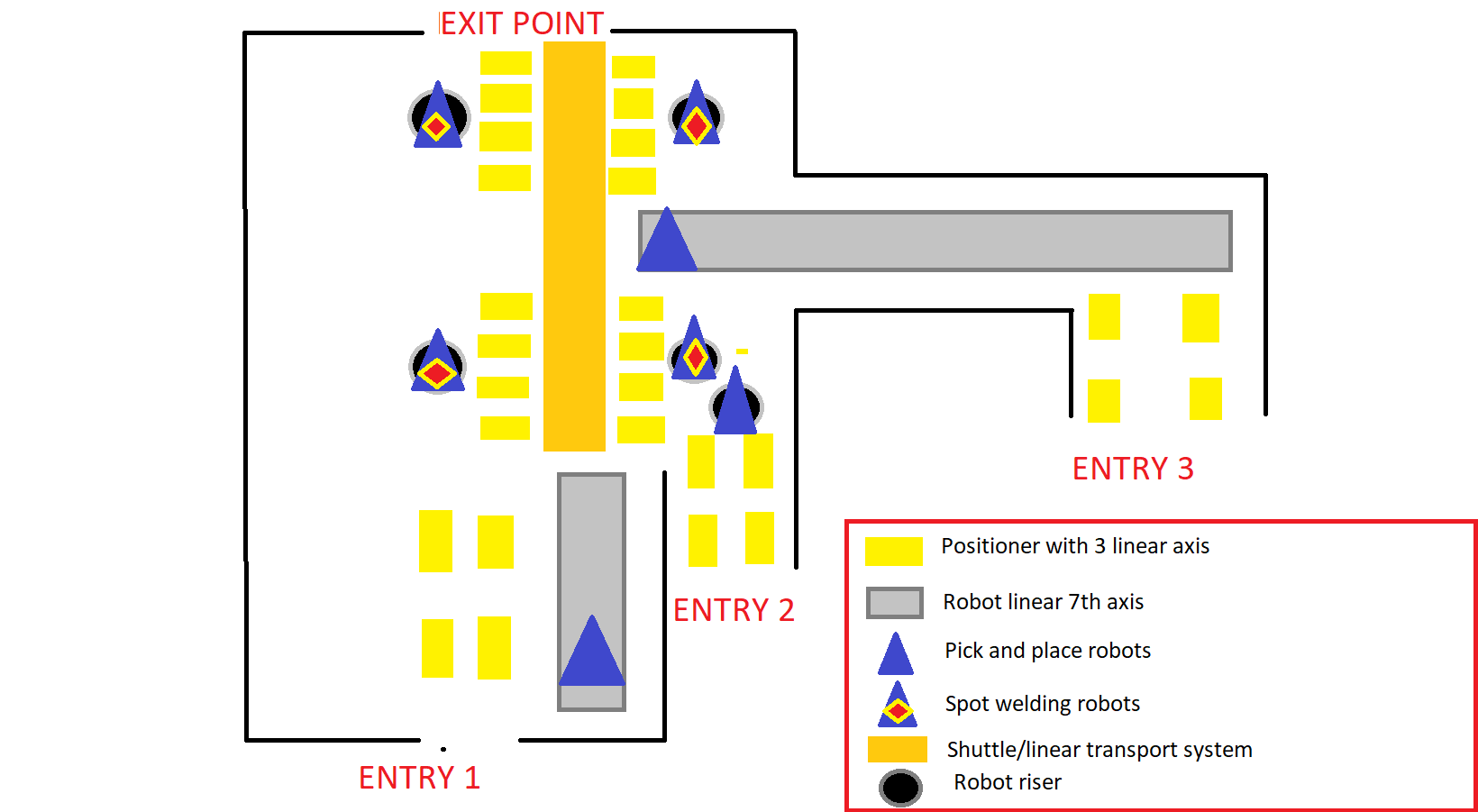
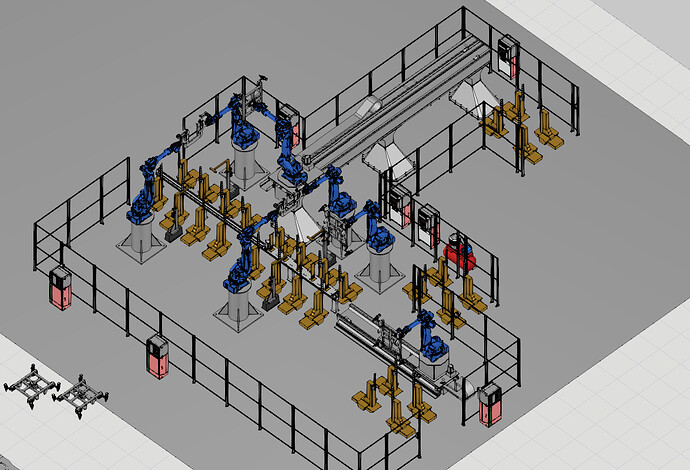
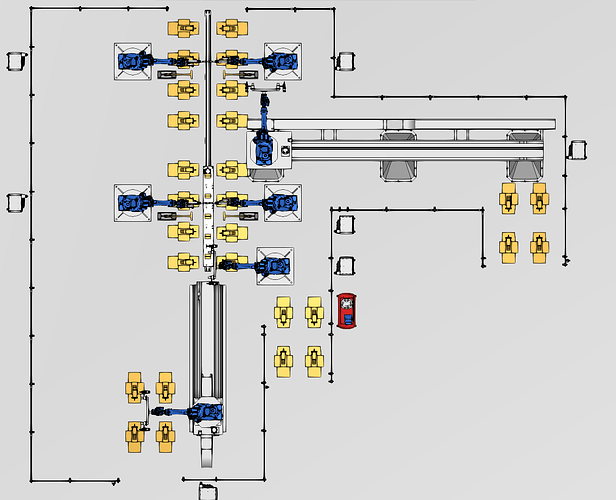
我的布局和工作流程(见所附截图):
-
输入/输出:3 个独立的 BIW 零件入口点,1 个出口点。
-
搬运:3 台搬运机器人从 4 个线性定位器上拾取零件,并将其放置到中央线上。
-
工序站 1(升降与焊接):
-
一组4 个同步线性定位器(自定义建模)必须接收零件。
-
逻辑:它们将装配体升起 → 点焊机器人进行焊接 → 它们将装配体降下到中央穿梭车上。
-
-
运输: 自定义线性导轨(穿梭车)将装配体运输到下一个区域。
-
工序站 2:
- 另一组 4 个定位器从穿梭车上升起零件 → 更多焊接 → 将其降下回来。
-
出口:穿梭车移动到出口。
我的问题:
-
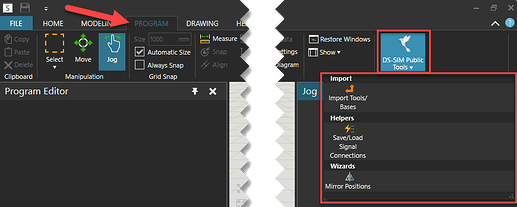
自定义几何体作为流程节点:由于我没有使用 eCatalog 零件,我需要向我的自定义 CAD 添加哪些行为(运输节点、流程执行器等)才能使其被流程流识别?
-
“四脚”工站:如何将 4 个独立的定位器视为仿真中的一个单一逻辑工站?我需要零件同时坐落在所有 4 个定位器上,但在逻辑上作为一个单元被处理。
-
复杂顺序:如何在流程建模中编程实现转移 → 升起 → 焊接 → 降下 → 转移的顺序?
以下是我当前布局的截图。
任何关于在纯自定义几何体上设置流程流的指导、教程或示例,对我的毕业设计都将非常有帮助。
提前感谢!
CELULA MANIPULARE SUDARE BiW GP225.vcmx(11.0 MB)

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~