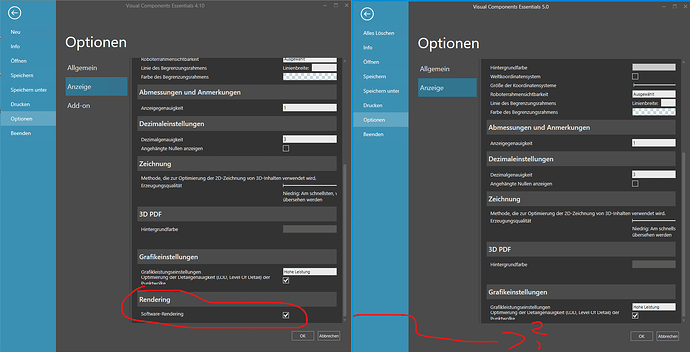
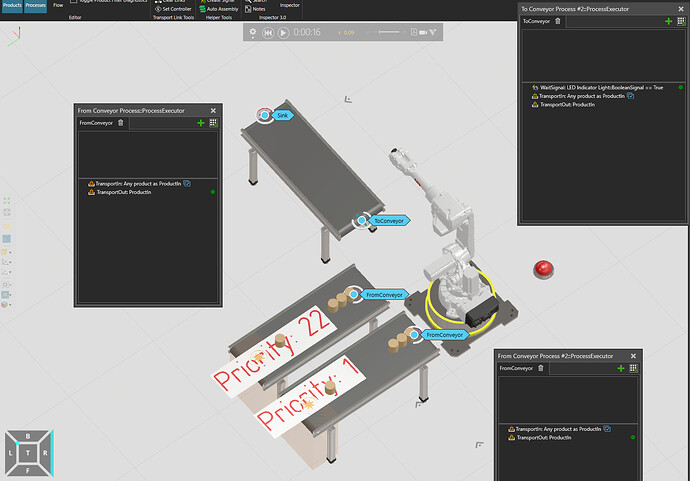
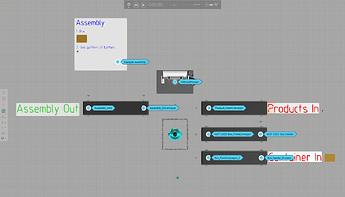
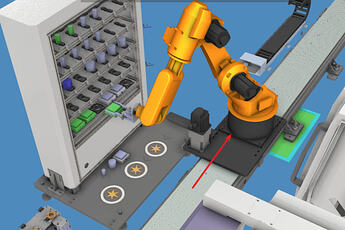
我正在使用流程流来实现机器人在工件架上的拾取和放置操作,机器人安装在一个导轨上。目前我遇到了一个问题:在拾取和放置工件时,机器人总是直接面向目标点。然而,由于工件架与机器人之间的距离较近,机器人在执行动作时会发生轴限位报警,如图1所示。
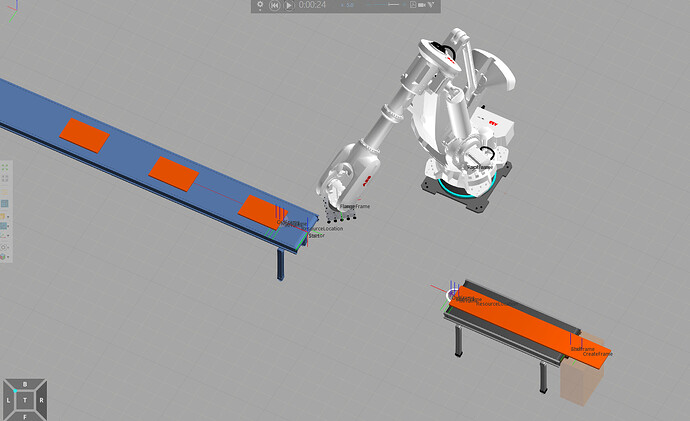
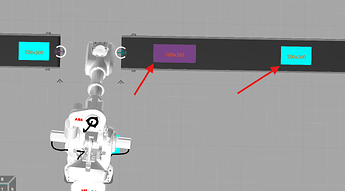
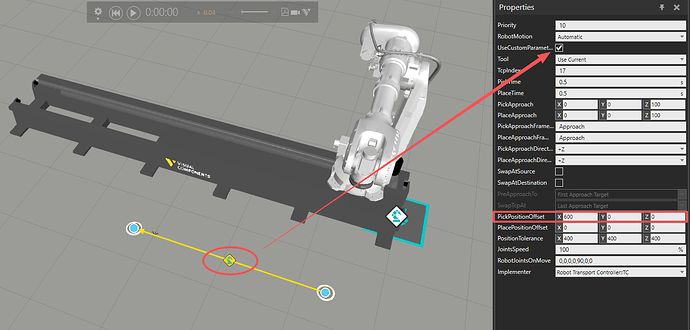
如果我是手动编程机器人,我会让机器人先移动到拾取和放置目标点的侧面,类似于图2所示的方式,然后再执行拾取和放置操作。这样可以帮助避免限位问题。然而,当前的运输控制器(或流程流仿真)似乎没有提供这样的偏移设置。有人能提供解决方案吗?前提是不移动设备。

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~