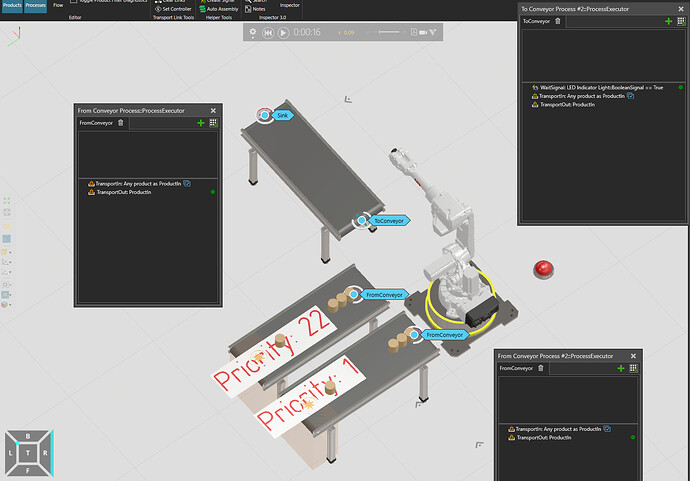
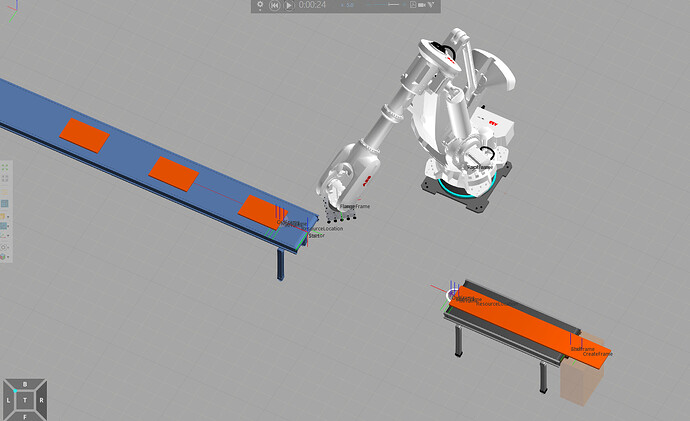
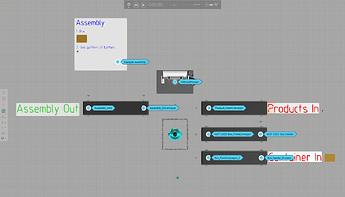
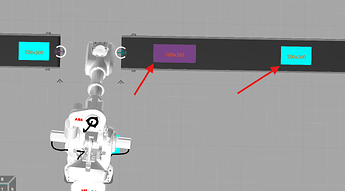
我有一个高级供料器,用于供给不同尺寸的板材。机器人从供料器拾取板材并将其放置在输送机上。长度在1593毫米及以上的板材在机器人释放后会按预期移动到输送机末端。长度小于1593毫米的板材在放置后不会在输送机上移动,它们就停在那里。零件的宽度似乎不影响放置后零件在输送机上的移动,只有长度有影响。我注意到输送机的“TransitionSignal”对于较小的零件不会打开,但对于较大的零件会打开。关于这个问题,有什么想法吗?
2 Robot Layout - Different Part Sizes.vcmx(385.9 KB)
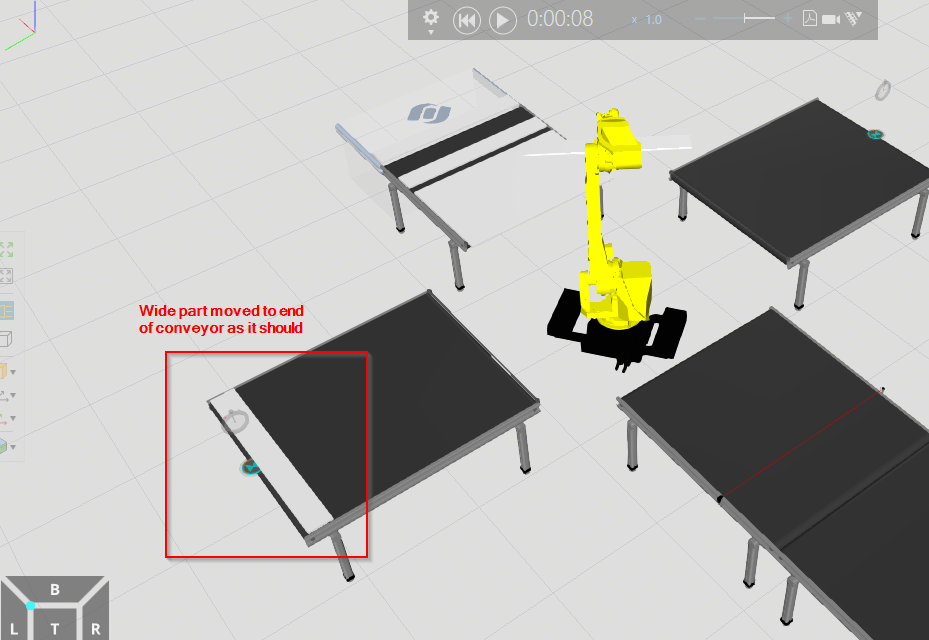
image929×640 91.2 KB
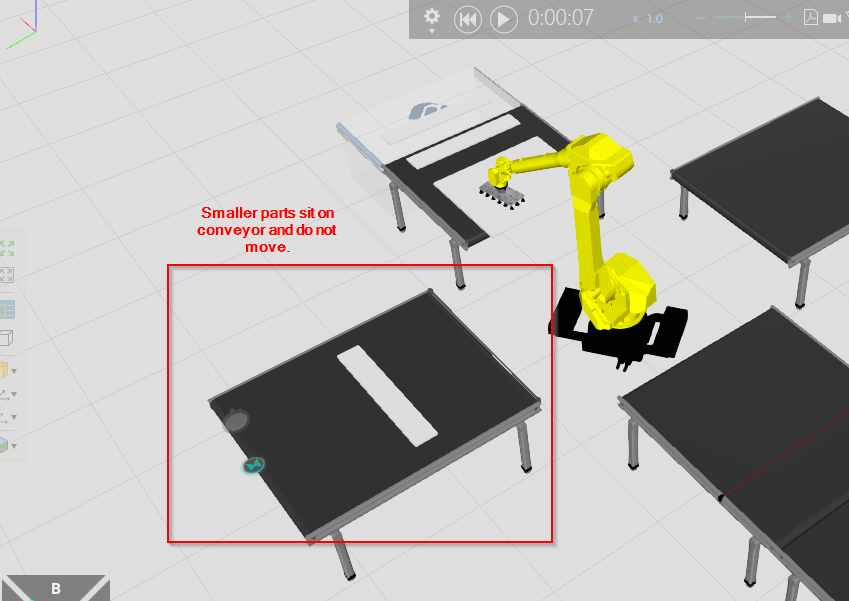
image849×601 84.2 KB
Tilma 2026年1月5日 下午2:232
你好,
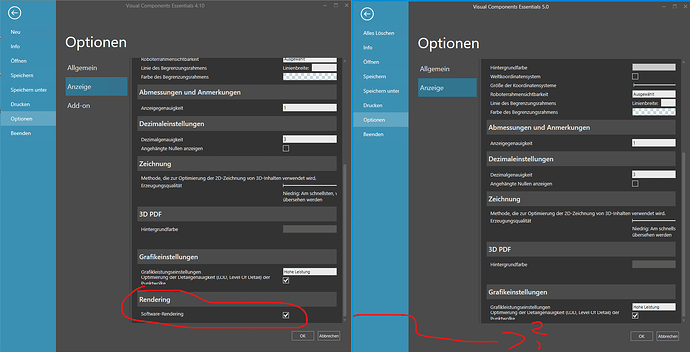
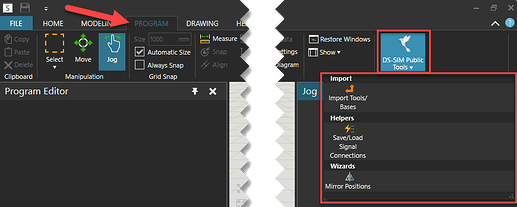
在机器人属性的“动作配置”中,将你用于释放的输出口的“重力方向”更改为0或1。目前机器人检测到的是零件下方的空间,而不是输送机。减小该值将使零件附着在输送机上:
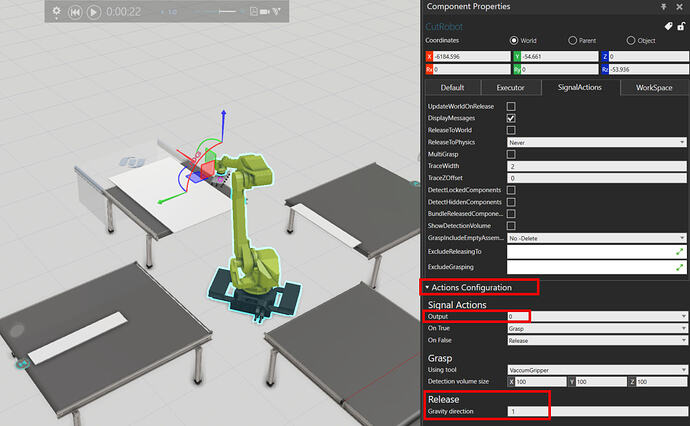
grafik1325×819 157 KB
ChadC 2026年1月5日 下午2:323
成功了。谢谢。我猜这是个简单的问题。不过,我有一个疑问。我对重力方向的理解是,只要输送机在EOAT的25毫米(原始/默认值)范围内,它就会检测到并按预期工作。将其设为1毫米似乎会使它无法检测到输送机。
Tilma 2026年1月5日 下午2:434
问题在于输送机实际上是中空的,因此25毫米的检测距离会落在输送机两个几何体之间的空隙中……1毫米则在零件下方,因此它能检测到上层带面。



 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~