

REV10.vcmx(8.7 MB)
大家好,
如果能得到任何帮助,我将不胜感激。我正在尝试创建一个流程布局,想法是稍后修改拾取和放置程序。
目前,我能够完成一个循环:拾取瓶子、装满它并将其放入箱子中。但我无法让机器人重复执行这个循环。
如果能得到任何帮助,我将不胜感激。我已附上文件供参考。
温暖的问候
Andy
REV10.vcmx(8.7 MB)
大家好,
如果能得到任何帮助,我将不胜感激。我正在尝试创建一个流程布局,想法是稍后修改拾取和放置程序。
目前,我能够完成一个循环:拾取瓶子、装满它并将其放入箱子中。但我无法让机器人重复执行这个循环。
如果能得到任何帮助,我将不胜感激。我已附上文件供参考。
温暖的问候
Andy
你好,
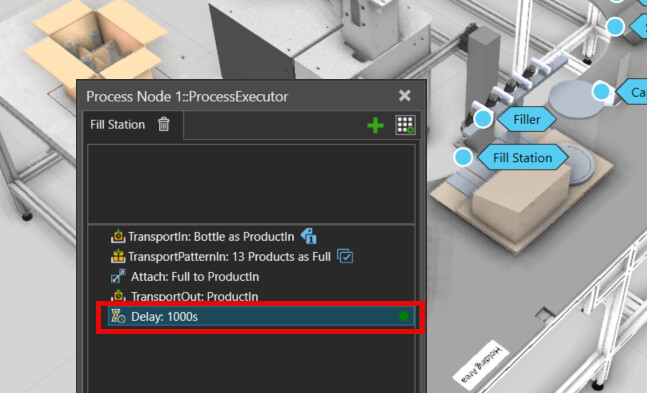
看起来它在工作,但你在第二个流程中设置了一个1000秒的延迟,所以在重复循环之前需要等待很长时间。你可以减少这个延迟,或者在最后一个流程中使用一个信号来知道循环何时结束以及何时开始新的循环。
你好 Tilma,
感谢你的回复。实际上我确实尝试了你建议的方法——循环完成后它就停止了。
REV11.vcmx(8.7 MB)
我能通过邮件或聊天联系你吗?我已经为此花了15个小时,精神都快崩溃了。![]()
![]()
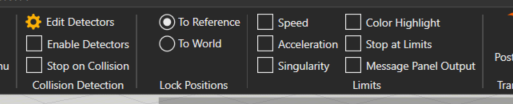
新文件对我来说也能工作。你勾选了这些选项中的任何一个吗?可能是因为碰撞或限位而停止:
哦,是吗?能工作是指它能重复循环吗?
我确实勾选了“奇点”选项。这有关系吗?
是的,它会等待“灌装站”中的延迟结束,然后拾取另一个瓶子并重复整个循环。→ 如果延迟是1000秒,你需要等待16分钟多一点……
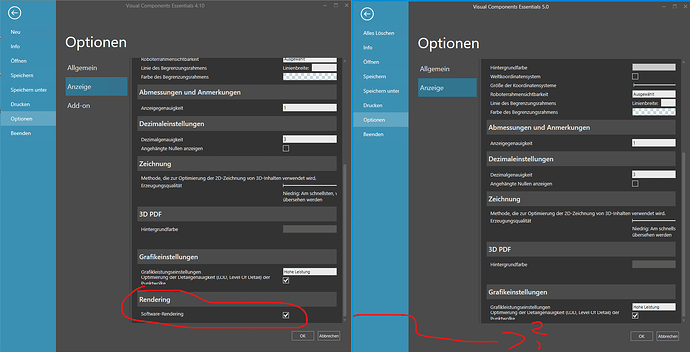
我刚刚试了勾选奇点选项,但它仍然有效。你用的是哪个版本?
我目前使用的是4.10版本,我已经移除了延迟并改用信号。
你好 Tilma,
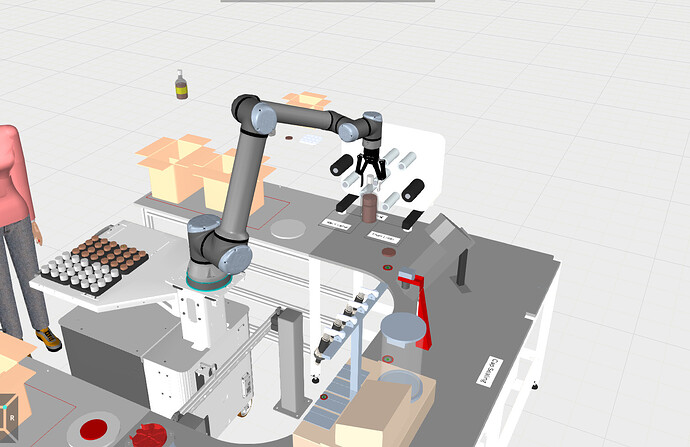
我有一个关于机器人编程结合流程建模的快速问题。
我在拾取方面遇到了一个小问题:
对此的任何指导将不胜感激。![]() 再次感谢。
再次感谢。
远程桌面支持 一般问题 amlandis3 2021年6月11日 上午4:341 为什么我们不能在Visual Components中使用远程桌面?...
2026-04-21visual Component General Questions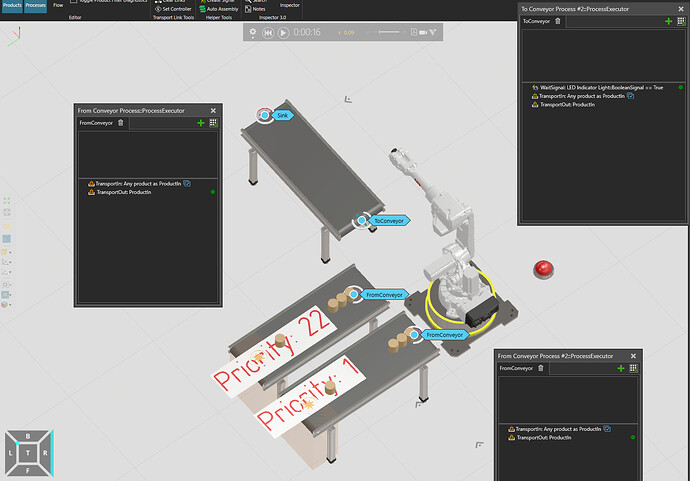
hans 2026年4月10日 上午7:211 关于进程转换的问题优先级。请看以下案例:...
2026-04-21visual Component Process Modeling
PartCreator 扩展与Python插件...
2026-04-21visual Component Extensions and Python Add-ons
jurel 2025年11月5日 上午8:171 你好, 我还有一个...
2026-04-21visual Component .Net Add-on Programming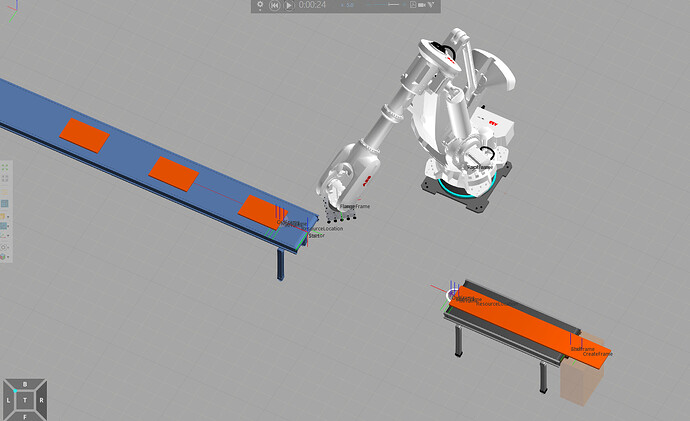
RaycastSensor 无法正常工作的常见原因及解决方案 1. 配置问题 传感器未启用:确保在代码或配置文件...
2026-04-21visual Component Process Modeling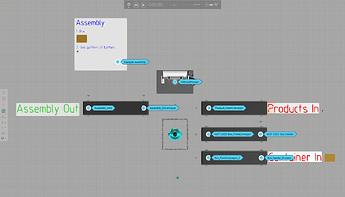
在手动流程中将产品装入容器作为装配 流程建模 中...
2026-04-21visual Component Process Modeling
我想请教一下,在VC5.0中如何使用MBD自动生成焊接程序。...
2026-04-21visual Component Robot Programming
汉斯 2026年3月24日,下午2:301 我已在通用传送带上添加此脚本,用于监听产品被添加到传送带路径...
2026-04-21visual Component Python Programming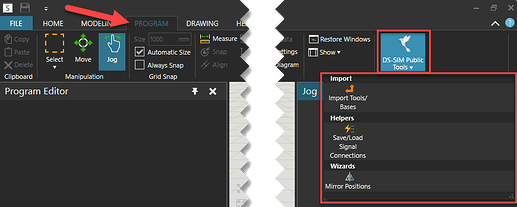
mastu 2023年5月10日,下午2:261 如果您在 KUKA.Sim(插件)或 KUKA OLP...
2026-04-21visual Component Extensions and Python Add-ons
上网淘巴领天猫淘宝优惠券,一年省好几千。
广告 ×您是本站第1538746名访客 今日有0篇新文章/评论

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~
