

Tutorial Task 1.3 - Adding and Removing Gaps
任务概述
本教程任务将演示在传送带上流动实体之间添加和移除间隙的几种方法。
使用内联传送器移除间隙
第一步中,您将看到如何通过改变汇流传送带的角度来移除流动实体之间的间隙。
添加额外决策点以移除间隙
第二步中,您将添加额外的决策点,以帮助合并控制器提高批次释放速率。
使用区域限制添加固定间隙
第三步中,您将学习如何使用预编程的区域限制选项列表在流动实体之间添加间隙。
使用区域限制添加可变间隙
最后一步中,您将根据流动实体的大小,使用区域限制在流动实体之间添加间隙。
步骤一移除批次中物品间的间隙
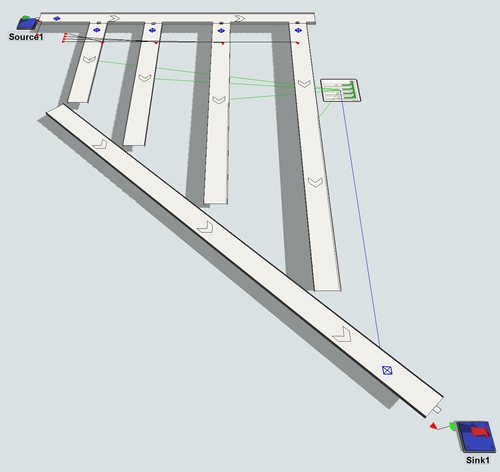
通常,构建料段输送系统的首要原因是为了减少流动实体之间的间隙,从而提高系统的整体吞吐量。在您于前一教程任务中构建的模型中,您可能已经注意到,在模拟运行时,当料段移动到合并输送带上时,每个流动实体之间会出现小间隙。这些间隙可能会降低系统的吞吐量,您可能希望尝试消除它们。
在此步骤中,您将更改输送系统的三维布局,使合并输送带呈一定角度。您将学习如何使用“连接输送带”工具来简化此过程。
需要注意的一点是,即使您在仿真模型中更改了合并输送带的角度,输送带仍可能在流动实体之间产生小间隙。在这种情况下,这可能是由于连接两条输送带的传输对象的角度设置造成的。您的角度设置将决定Flexsim是将传输视为侧向传输还是直连传输。有关更多信息,请参阅使用传输对象。
为了预防可能出现的问题,您还将在本步骤中创建一个新的全局传输类型,以增加“最大角度”属性。此属性提高了将传输视为直连传输的阈值。最后这一步并非必需,但在排查自己的合并输送系统问题时,了解这一点非常有用。
要创建此输送系统:
- 点击合并传送带以选中它。移动传送带头部(右端),使传送带大致呈60度角。
- 重新调整料段生成传送带的末端位置,使其几乎接触到合并传送带。您可能还需要重新定位合并传送带上的接收点和决策点。
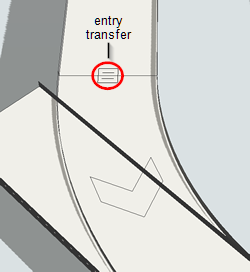
- 点击连接传送带工具库中的工具以进入连接模式。点击第一条料段生成传送带,然后点击合并传送带通道(位于第一条传送带稍右侧),以在两条传送带之间创建弧形连接。
- 对每条料段生成传送带重复此步骤。
- 打开工具箱。点击添加按钮
 以打开菜单。指向传送带系统,然后点击传输类型以打开传输属性窗口。
以打开菜单。指向传送带系统,然后点击传输类型以打开传输属性窗口。 - 在顶部的名称框中,将传输类型名称更改为SlugTransfer。
- 在最大角度框中,输入60以增大角度。
- 点击确定按钮保存更改。请注意, 现在SlugTransfer类型会显示在工具箱中(位于输送系统下,然后是传输类型)。
- 点击传输(位于转向输送机和合并输送机之间)以高亮显示它。
- 在属性中,点击传输类型菜单并选择SlugTransfer。
- 对每个转向输送机重复步骤9-10。
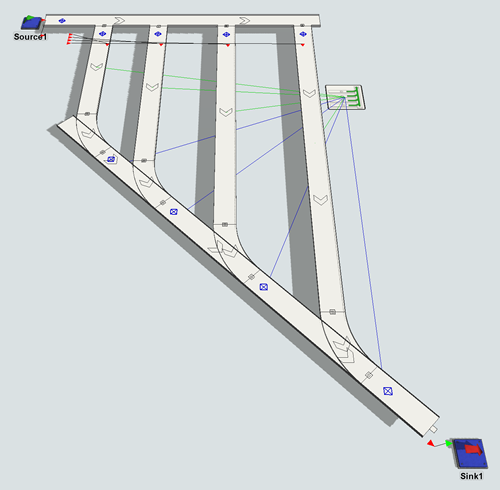
运行仿真模型。现在物料应能平稳传输,不会出现任何间隙。
步骤 2提高物料块释放速率
在仿真模型的当前阶段,各料段汇入传送带时仍存在较大间隙。本步骤中,您将学习通过进一步缩小间隙来提升料段释放速率的技巧。
提升料段释放速率的方法之一是增加传送带上的决策点数量,并将其连接到合流控制器。增加决策点能为系统提供更多传感器,用以监测料段在合流传送线上的位置,并判断是否有足够空间释放新料段。合流控制器将因此能更频繁地释放料段。您还可采用轮询策略(若适用)来进一步提升料段释放速率。
请按以下步骤提升料段释放速率:
- 拖出3个决策点并在合流线上每个出口传送装置旁各放置一个。
- 为清晰起见,请将合流传送带上的决策点按以下方式重命名:
- 从合并控制器到每个新的决策点创建一个端口连接(A-连接)。
- 点击合并控制器以高亮显示它。
- 在属性面板中,位于合并控制器选项卡下,点击释放策略旁边的箭头,并选择轮询可用时。
- 点击源以高亮显示它。在属性面板中,位于在部分,将到达间隔时间改为
2.5。
| 决策点 | 新名称 |
|---|---|
| 最接近Slug1末端的决策点 | Point1 |
| 最接近Slug2末端的决策点 | Point2 |
| 最接近Slug3末尾的决策点 | 点3 |
| 最接近Slug4末尾的决策点 | 点4 |
运行仿真模型。现在,料块释放速度应比之前稍快,从而减少物品之间的间隙。同时,你的吞吐量现在几乎翻倍了。
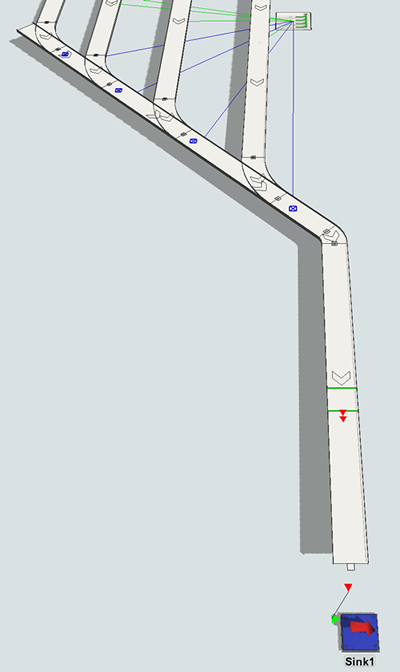
步骤 3在合并后为物品添加间隙
现在,物品已按其产品类型排序并合并到一条传送带上,你将在合并传送带线上添加一些间隙,使流动物品之间具有标准化的间距。
在此步骤中,你将在合并传送带的末端创建一条传送带。然后,在间隙传送带上添加两个光电传感器。在每个光电传感器上,你将使用区域限制下拉菜单选项,在流动物品之间添加一个相当于光电传感器之间距离的间隙。
要创建此间隙逻辑:
- 断开(按住 Q 键)吸收器与合并传送带的连接。
- 在合并传送带末端垂直添加一条直传送带。使其长度相当长。
- 为了明确起见,请重命名此输送机间隔输送机。
- 使用连接输送机工具将合并输送机连接到间隔输送机。
- 将吸收器移动到间隔输送机的末端,并使用输入/输出连接(A-连接)将其连接到输送机。
- 从库中拖出2个光电传感器,并将它们放置在输送机中间彼此靠近的位置。
- 在两个光电传感器之间创建端口连接(A-连接)。
- 点击上游的光电传感器以高亮显示它。
- 在属性面板中,位于光电传感器部分,点击编辑属性按钮
 ,该按钮位于光电传感器类型下拉菜单旁边。
,该按钮位于光电传感器类型下拉菜单旁边。 - 在光眼类型属性窗口,清除需要间隙来清除复选框。
- 在触发器组中,点击添加按钮以打开菜单。选择在块上。
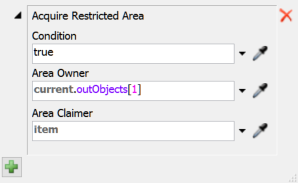
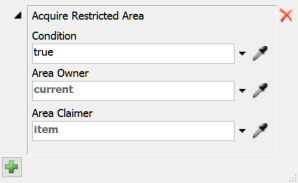
- 在在块上触发器旁边,点击添加按钮以打开菜单。指向区域限制并选择获取区域。
- 您将使用默认设置,因此只需确认设置与以下图像匹配:
- 按下确定保存更改的按钮。
- 点击下游光电眼使其高亮显示。
- 在属性中,于光电眼部分,点击编辑属性按钮,该按钮位于光电眼类型下拉菜单旁边。
- 在光电眼类型属性窗口中,于触发器组内,点击添加按钮以打开菜单。选择清除时。
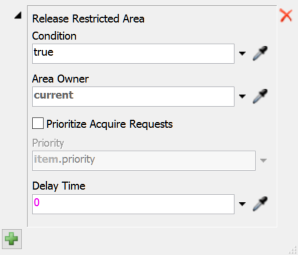
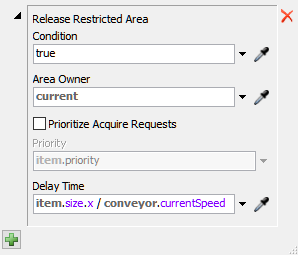
- 在清除时触发器旁边,点击添加按钮打开一个菜单。指向区域限制并选择释放区域。
- 您将使用默认设置,因此只需确认设置与下图相符:
- 按下确定按钮以保存更改。
重置并运行仿真模型。光电传感器应在流程物品之间添加一个小间隙。
步骤 4添加可变间距
假设您想要在物品之间添加不同大小的间隙。例如,假设不是固定的物品间隙,而是间隙大小由流程物品的尺寸决定。此步骤将演示如何为间距添加这种可变性。
您首先需要设置源以创建具有可变尺寸的流程物品。然后,移除一个光电传感器,并将剩余的光电传感器设置为使用“获取区域”和“限制区域”下拉列表选项。您将在释放区域下拉列表中将延迟时间设置为基于流程物品的X轴尺寸。
要创建此可变间距逻辑:
- 单击以突出显示它。在属性中,于触发器部分下,点击添加按钮以打开菜单。选择创建时。
- 在创建时触发器旁边,点击编辑属性按钮以打开下拉列表属性。
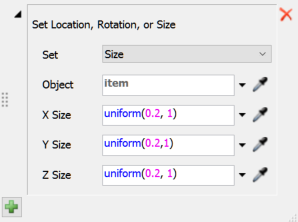
- 点击添加按钮在属性窗口的底部。指向视觉,然后选择设置旋转、大小或位置。
- 点击设置菜单并选择尺寸。
- 在X 尺寸框中输入
均匀分布(0.2,1)。 在Y 尺寸和Z 尺寸框中输入相同的内容。 - 现在你的间隙传送带上有两个光电眼。删除第二个(下游那个)。
- 点击剩余的光电眼以高亮显示它。在属性面板的光电眼部分,点击编辑属性按钮旁边的光电眼类型打开光电传感器类型属性窗口。
- 在触发时触发器旁边,确认此触发器使用了获取限制区域选择列表选项。点击编辑属性按钮以打开选择列表属性。
- 在区域所有者框中,输入
当前。然后关闭该框以保存更改。 - 在清除时框旁边,点击添加按钮以打开菜单。指向区域限制,然后选择释放区域.
- 点击延迟时间框旁边的箭头以打开菜单。从菜单中选择传送物品X尺寸所需时间。
重置并运行仿真模型。宽度较小的物品之间的间隙将小于宽度较大的物品。
步骤5使用过程流控制合并
在此步骤中,您将使用过程流工具中的模板来减少间隙并提高系统的整体吞吐量。过程流模板是预构建的过程流,可作为为3D对象创建自定义逻辑的起点。这些模板是自文档化的,这意味着每个模板都包含关于逻辑如何工作的详细、逐步说明。您可以使用模板中的默认逻辑,或修改模板以创建自己的自定义逻辑。
在此步骤中,您将学习如何将合并控制器链接到合并控制器过程流。首次打开合并控制器过程流时,您会看到一个标题为操作指南. 本部分介绍如何将合并控制器链接至模板。本教程将跳过模板描述中列出的一些流程(因为您已完成这些操作),并会不按顺序执行某些步骤,但基本流程大致相同。
首先,您将把合并控制器附加到流程流中。接着,在模板的流程流变量中设置料段通道间的目标间隙。(详细信息请参阅流程流变量。)
要创建此流程流:
- 在主工具栏上,单击流程流按钮以打开菜单。指向添加对象流程流,然后选择间隙优化合并控制器。
- 单击流程流的空白区域以确保未选中任何内容。
- 在属性面板的流程流实例组中,找到附加对象
(实例)属性。点击采样器按钮
 进入采样模式。
进入采样模式。 - 点击合并控制器在3D模型中进行采样。它现在应被列为流程中的附加对象之一。
- 在属性下的流程变量组中,找到目标合并间隙框。将目标间隙更改为
0.75。 - 在3D模型中,删除间隔输送机上的光电传感器。
- 删除合并输送机上的以下决策点:
- 点1
- 点2
- 点3
- 点击合并控制器以突出显示它。
- 在属性面板中,于合并控制器部分下,
在释放策略框中,删除所有文本并输入
0。 - 点击来源以在右侧显示其属性。
- 在来源部分下,将到达间隔时间更改为
1.5。
重置并运行仿真模型。现在,批次释放之间的间隔更小,从而进一步提高了系统的吞吐量:
结论
既然你已经学习了在输送系统中添加和移除空隙的一些技巧,现在就该转向其他类型的系统了。在接下来的教程任务中,你将学习如何创建动力与自由输送系统。请继续前往教程任务 1.4 - 动力与自由系统。
Cookie preferences
May we collect and use your data?
Learn more about the Third Party Services we use and our Privacy Statement.THIRD PARTY SERVICES
Strictly necessary – required for our site to work and to provide services to you
Improve your experience – allows us to show you what is relevant to you
Customize your advertising – permits us to offer targeted advertising to you
Are you sure you want a less customized experience?
Your experience. Your choice.
May we collect and use your data to tailor your experience?
Explore the benefits of a customized experience by managing your privacy settings for this site or visit our Privacy Statement to learn more about your options.

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~

