大家好!
我最近一直在研究焊接部分,有一个奇怪的问题。在焊接寻位过程中,有多种方法,而我对喷嘴接触这种方式总感觉有些不安。
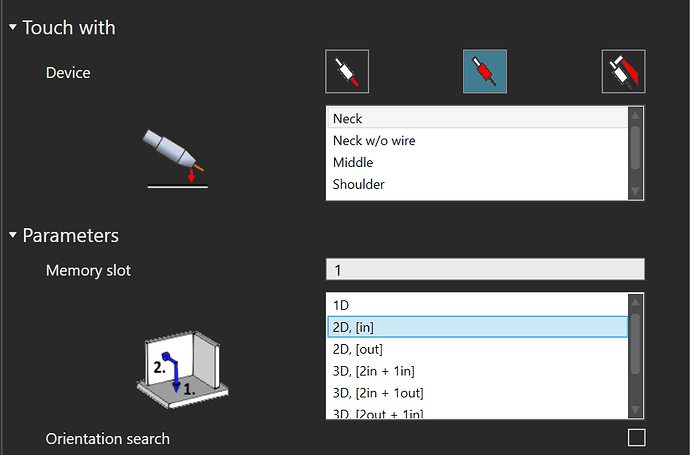
image946×624 35.3 KB
通常,他是用焊枪的颈部来触碰,但更多时候我看到他甚至无法接触到物体表面,就像这样:
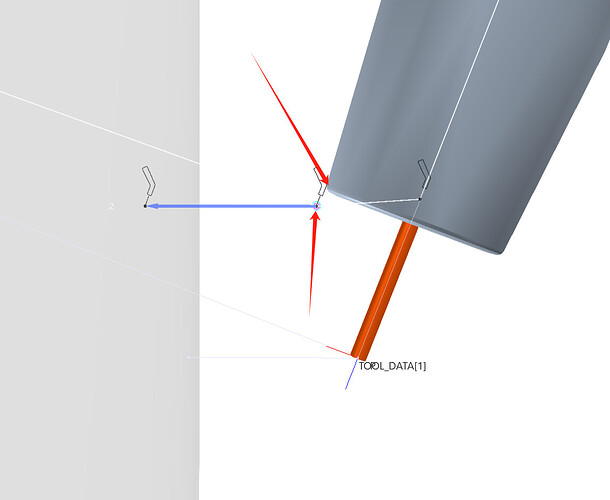
image1146×939 58.4 KB
我尝试了很多次,感觉这种行为是因为 VC 的工具偏移程序只处理坐标系,而不关心何时或如何触碰。这让我感到困惑,因为我以前使用 VC 做过需要碰撞检测的项目,并且知道 VC 至少对三角面的碰撞处理得不错。但为什么这个需要碰撞接触的功能却使用坐标系呢?
当然,既然它使用了坐标系,那肯定是有原因的。但这也导致了一个问题:喷嘴颈部是一个圆。我如何才能确保在不同姿态下,能够正确校准工具接触(喷嘴颈部接触材料表面)而不会撞到机器?
Mats2 2026年1月14日 上午10:103
你好 BAD,
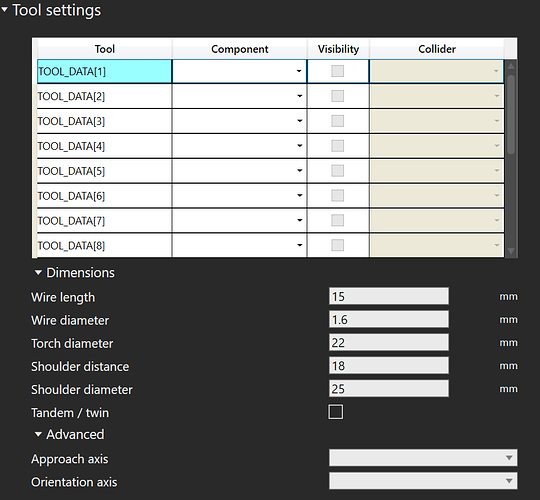
当你将 TCP 设置为工具,然后之后又更改了几何体时,就会发生这种情况。可能是因为有人修改了焊丝长度并传输了几何体,导致 TCP 保持不变而焊丝伸出长度变长了。
要解决这个问题,尝试重置 TCP → 只需将其重新设置为焊丝尖端即可。
如果问题仍然存在,请告诉我。
BAD 2026年1月14日 上午10:264
你好,Mats2!
这只是一个我随意拼凑的演示环境,只使用了 VC 的内置模型,包括机器人是 KUKA KR210 R2700,焊枪是机器人工具中的默认焊枪。
所以,我需要一份包含这些参数的手册才能使用 VC 的搜索模块,或者说,这是 VC 搜索模块精确工作的唯一方式吗?非标准焊枪怎么办?
Mats2 2026年1月14日 下午12:385
你好 BAD,
这个工具似乎有问题。我测试了它,当使用工具自带的 TCP 时得到了相同的结果。然而,当我使用机器人属性中的第一个工具并将 TCP 设置为该工具时,它立即就起作用了。
我会报告这个问题,希望将来它能正常工作。
1 个赞
BAD 2026年1月14日 下午1:576
好的,Mats2,感谢您的快速回复!
那么,如果我以后使用自己的模型,应该注意什么?从您说的来看,如果建模层级稍有偏差,该功能就会出现问题,但我在手册中没有看到这方面的描述。



 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~

