

嗨~
我通过观看视频了解了物理电缆。
但是,我不知道如何布局和使用这种电缆。
我想了解关于这种电缆的信息。
(我使用的程序是Professional 4.1版本。)
建议将物理电缆作为一个独立的组件,因此创建一个新组件并向其中添加物理电缆行为,然后保存该组件。
在此基础上,根据需要添加更多引脚,以使电缆在其长度的某些点上保持稳定并能够弯曲。也就是说,为每个额外需要的引脚创建一个新节点。如何操作?以两个引脚节点为参考,遵循命名约定,例如Pin_3。这两个引脚节点在添加物理电缆行为时会自动为您添加。每个引脚都需要一个物理实体行为,并且需要具有正确的名称。
关于属性,可随时参考帮助文档中的行为参考和任务 > 物理部分。您也可以查阅帮助文档中提供的Nvidia Physx链接以及Unity参考指南,因为两款软件都采用Physx物理引擎。但属性的具体实现方式可能存在差异,例如默认值可能不同。
然而,定制缆绳是最困难的部分,需要您自行测试。首先,将缆绳的首尾锚点移动到所需位置。即进入建模选项卡,选中锚点节点后使用移动工具将其拖拽至目标位置。接着设置其锚定属性。您也可以尝试使用附着命令来设置该属性。但请注意:附着操作不会移动锚点位置!设置好缆绳首尾锚点后,运行模拟并观察缆绳在重力影响下的默认运动状态。我记得端点默认会呈现悬挂摆动状态(但记忆可能不准确)。无论如何,缆绳具有定义端点运动方式的属性,例如像吊桥般摆动、像连接/耦合关节般固定,或是像桥梁的张力链侧轨那样具有特定运动模式。
根据需要重置仿真以回到线缆的初始状态。从那里开始,调整线缆本身的刚度并运行仿真,同时让机器人执行一个简单的程序,观察线缆如何移动。如果你看到线缆出现一些鼓包或断裂,那可能是因为它太硬或者不够长。请注意,线缆由胶囊体组成,这些是沿着线缆长度生成的小型椭圆形几何体。如果线缆的“长度”属性为零,长度会根据线缆的端点等自动计算。在某些情况下,你可以尝试指定一个固定长度。但为了避免断裂,可以考虑测试张力和速度/位置迭代属性来达到所需效果。
这是个挑战,我的朋友,所以对于机器人线束包,考虑使用几何体而非物理线缆。例如,使用eCat中的某个KUKA机器人作为模板,用几何体创建你自己的线缆。
大家好,
我遇到了以下问题:我在仿真中插入了一根线缆,但在仿真过程中线缆穿过了机器人手臂。
有没有办法调整它,让线缆表现得像实体一样?也就是说,不希望它穿过机器人手臂?(见图)
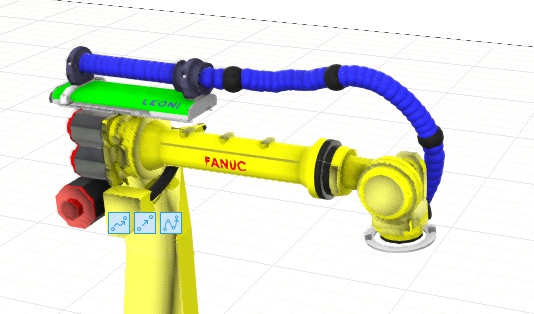
你好@WilliamSmith我正在尝试实现您在帖子中提到的内容,即把库卡机器人上使用的dress out组件应用到其他机器人上。
但我对visual Components还比较陌生,希望能得到一些正确的指导。
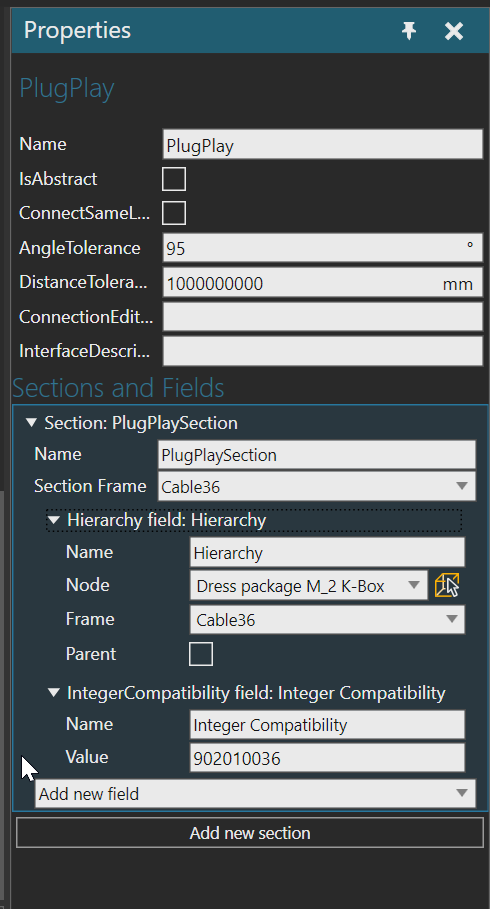
我看到这个组件上有一个即插即用行为,我尝试用PnP工具将它从库卡机器人上断开
这个操作成功了。
然后我在我的发那科机器人上创建了一个与库卡机器人同名的框架,名为“Cable36”。
接着我尝试将它连接到发那科机器人上,看起来它似乎想要连接一下,但最终并没有成功。
我正在努力解决这个问题,任何帮助都将不胜感激。我知道你们都很忙,但真的非常感谢任何建议,哪怕只是一个小小的正确方向上的提示。
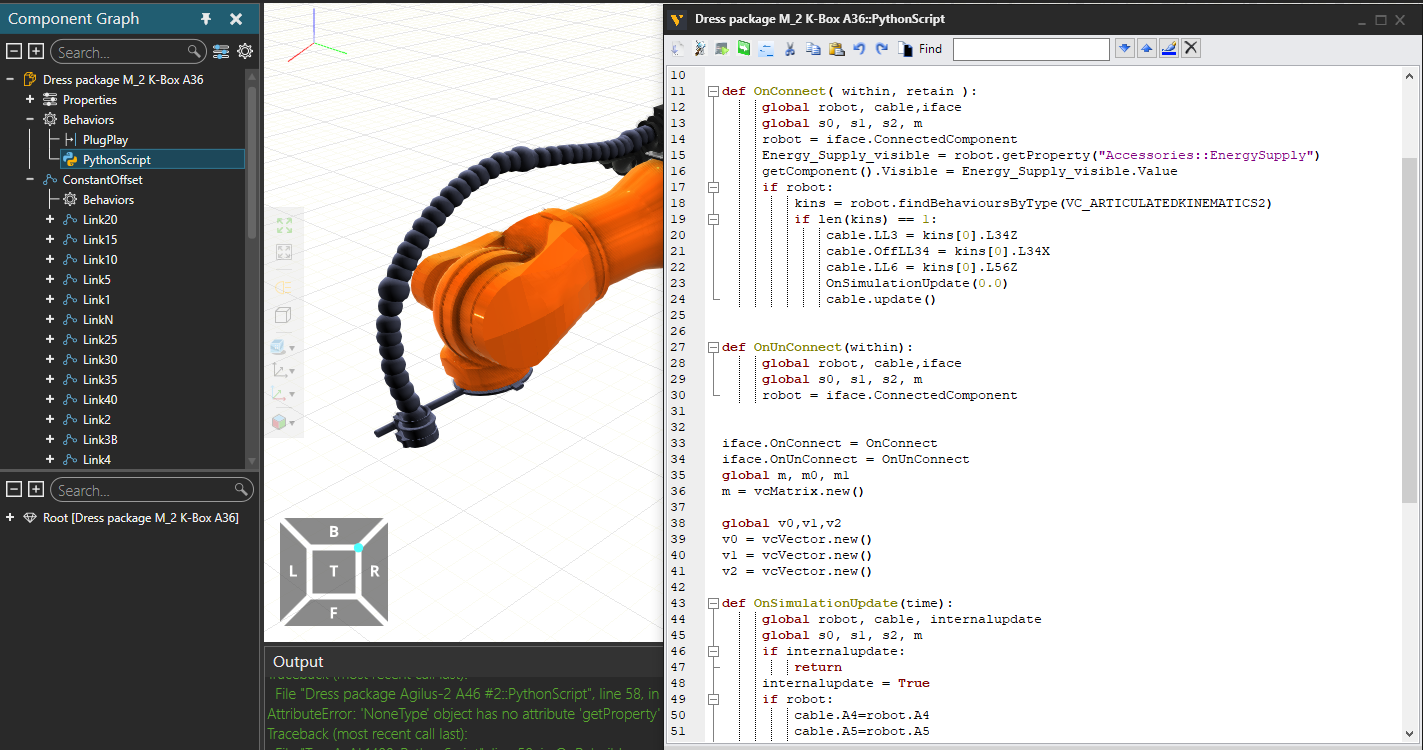
例如,我是否需要修改Python脚本?
我是否需要给机器人添加行为或属性?
任何帮助都将不胜感激。
谢谢
我不清楚您具体使用的是哪款库卡机器人,而且通常来说,线缆包在eCat中是无法直接搜索的。您所使用的线缆包很可能采用了带有整型字段的即插即用接口。一般来说,整型字段用于处理兼容性问题,并筛选哪些设备可以或不可以相互连接。例如,库卡机器人的线缆包很可能无法直接即插即用到发那科机器人上,除非2020年又出现了什么意想不到的新变化!
在您的线缆包中,请移除整型字段,并/或在您的机器人上添加接口,以便用所需的字段和数值来连接线缆包。进行任何连接时,请确保字段的顺序也保持一致。
除此之外,物理线缆在eCat组件中仍未广泛使用,因此大多数线缆包仍然采用变换、表达式和球体图元的组合方式。
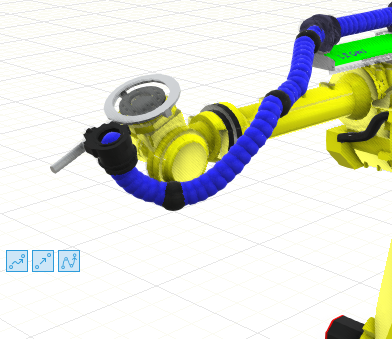
@WilliamSmith问题解决了!!我只是想展示一下,并对您的帮助表示万分感谢
您真是太厉害了!
感谢您回复这个已经有些久远的帖子。如您所见,我现在已经让它在我的发那科机器人上运行了。虽然还不完美,有时动作会有点奇怪,可能和各个关节使用的公式有关。但我可以接受,随着我对Visual Components越来越熟悉,希望能逐步改进。
很高兴听到这个消息。是的,动作确实会有点奇怪,尤其是在关节转动/极限位置附近。技术支持人员或许能帮您改善动作效果,或者为线缆建模提供一些最佳实践,因为技术支持团队也会更新eCat。
您能提供相关的教程吗?
@CarlosPlazas您能分享一下是如何让仿真运行起来的吗?
@jmoney,请注意,eCat 4.9 中有一个新组件“通用关节机器人线缆”。

上网淘巴领天猫淘宝优惠券,一年省好几千。
广告 ×您是本站第1537466名访客 今日有0篇新文章/评论



 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~
